Kredit:University of Luxembourg
Fysiker från universitetet i Luxemburg har nyligen presenterat ett nytt material som kan bli en nyckelkomponent i en ny infrastruktur utformad för att hjälpa robotar att förstå sin omgivning. Teamet visar att materialet kan användas för att introducera skräddarsydd grafisk information i miljön, som är osynlig för människor men lätt att läsa av robotar. Det nya materialet och det innovativa förfarande genom vilket det möjliggörs har nyligen publicerats i Avancerade funktionella material , en av världens främsta tidskrifter inom materialvetenskap.
Automatiseringens regeringstid
Utbredd automation är en nyckelkomponent i den pågående fjärde industriella revolutionen. Det nuvarande intresset för automation förutser en enorm expansion av konceptet, ofta involverar maskiner som inte bara är automatiska utan också autonoma och mobila, som självkörande bilar eller drönare. I motsats till vad termen "Industry 4.0" kan antyda, dessa maskiner kommer sannolikt också att engagera sig i direkt interaktion med människor, även på platser utanför industriproduktionen, som våra hem eller icke-industriella arbetsplatser.
"Lika fördelaktig som denna övergång till allestädes närvarande automation kan vara, det kommer också med betydande utmaningar av många slag. En av de viktigaste tröskelvärdena orsakas av säkerhetsproblem:som framgår av återkommande tragiska dödsfall som involverar autonoma fordon, de har för närvarande en otillräcklig förståelse för sin miljö trots toppmodern inbyggd sensor och beräkningsteknik. Det är helt enkelt inte lätt att förstå det upptagna, komplex och rörig värld som vi människor skapar och lever i, full av signaler, några viktiga, vissa distraherar bara, och andra som ändå är rent buller, "förklarar Jan Lagerwall, Professor vid institutionen för fysik och materialvetenskap (DPhyMS) vid universitetet i Luxemburg och huvudforskare av studien.
Ny metod med flytande kristaller
Medan de flesta försök att tillåta robotar tillgång till mänskliga miljöer fokuserar på att ge robotarna en kombination av flera sensoriska input och massiv beräkningskraft, ett annat tillvägagångssätt föreslås nu av prof. Jan Lagerwall och hans två teammedlemmar Yong Geng och Rijeesh Kizhakidathazhath från universitetet i Luxemburg, i samarbete med prof. Mathew Schwartz, som är expert på automation och design av den byggda miljön vid New Jersey Institute of Technology.
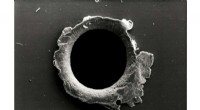
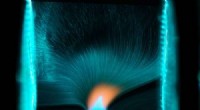
Det viktigaste genombrottet som presenteras i artikeln är förverkligandet av retroreflekterande sfärer gjorda av kolesteriska flytande kristaller, som omvandlas till fast tillstånd genom en process som kallas polymerisation. På ett sätt, dessa sfärer liknar de reflexer vi har i säkerhetsvästarna i våra bilar, i vägmärken och i vissa kläder, eftersom de skickar tillbaka ljus till källan oavsett i vilken riktning de är upplysta. Men det finns två mycket viktiga skillnader som gör dessa kolesteriska sfäriska reflektorer (CSR) så användbara. Först, reflektionen är begränsad till ett smalt våglängdsområde, förklara varför det mänskliga ögat inte ser dem. Andra, reflektionen är cirkulärt polariserad, på samma sätt som var och en av de två filmerna som visas samtidigt i en 3D-biograf är cirkulärt polariserade, på motsatta sätt.
"Om du någonsin tog av dig dina glasögon när du var på en 3D-biograf kommer du att ha märkt att det mänskliga ögat inte kan urskilja olika polarisationer, eftersom båda våra ögon då ser båda filmerna, och vi upplever helt enkelt en konstig "skuggeffekt". Glasögonen innehåller cirkulära polarisatorer, en högerhänt och den andra vänsterhänt, se till att vårt högra öga bara ser filmen för det högra ögat, vänster bara filmen för vänster öga. Utanför en biograf, världen är mycket sällan cirkulärt polariserad och detta betyder att den cirkulära polariseringen av CSR är ganska unik. En robot som är utformad för att läsa upp CSR-kodad information kommer att ha två kameror, båda verkar i de ultravioletta och/eller infraröda områdena där CSR:erna reflekteras, och var och en kommer att ha en cirkulär polarisator av olika typ, precis som 3D-bioglasögon. Roboten subtraherar en bild från den andra, vilket betyder att all visuell information som inte är cirkulärt polariserad, som är allt innehåll utom CSR, avbokas, eftersom denna information verkar identisk med de två kamerorna. Men CSR finns kvar, eftersom de bara är synliga för en kamera men inte för den andra. Detta gör att roboten kan identifiera den CSR-kodade informationen extremt snabbt, med minimal beräkningskraft, och utan risk för falska positiva, " förklarar forskarna.