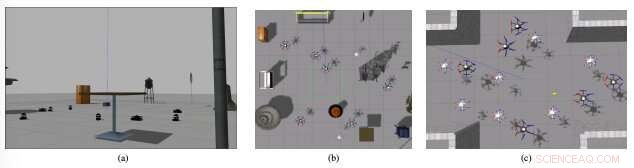
Ögonblicksbilder medan robotarna navigerar över olika okända miljöer med hjälp av den algoritm som föreslås i detta arbete. Kredit:Govind Aadithya R et al.
Forskare vid SRM Institute of Science and Technology i Indien har nyligen utvecklat en decentraliserad algoritm för generering av banor för system med flera agenter. Deras algoritm, presenteras i en tidning förpublicerad på arXiv, kan generera kollisionsfria banor för robotar när de förses med ett initialtillstånd och önskad slutposition.
"Govind och hans team kontaktade mig ambitiöst och sökte mitt förslag för deras kandidatprojekt, "Sivanathan K, senior forskare som ledde studien, berättade för TechXplore. "Att känna till sin matematiska förmåga, Jag kände att de borde tilldelas ett utmanande problem som framtiden väntar på att lösa. När världen går mot autonoma bilar, Jag föreslog att man skulle utveckla en decentraliserad algoritm för autonoma fordon för att navigera i korsningar. Vi kände att algoritmens prestanda inte höll standarden, så vi utökade arbetet till att utveckla en algoritm som kan göra det möjligt för autonoma fordon att navigera genom en okänd miljö, undvika kollision med andra robotar/hinder."
Multirobotsystem involverar ett antal robotagenter eller autonoma fordon som samarbetar om en mängd olika uppgifter. Dessa system kan ha intressanta tillämpningar inom ett antal områden, inklusive transport, underhållning, säkerhet och rymdutforskning.
När flera robotar arbetar tillsammans på en viss uppgift, deras banor kräver noggrann planering för att säkerställa att robotarna inte kolliderar med varandra och att deras dynamiska gränser inte överträds. Än så länge, de flesta tillvägagångssätt för generering av banor har centraliserats, vilket innebär att de genererar banor i förväg och sedan överför dem till enskilda robotar.
Medan centraliserade tillvägagångssätt fungerar bra i kända miljöer och med ett begränsat antal robotar, de är mycket svåra att tillämpa i större skala. På senare år har därför, forskare har arbetat med decentraliserade tillvägagångssätt som kontinuerligt kan omplanera banor, reagera på oväntade förändringar eller hinder i miljön.
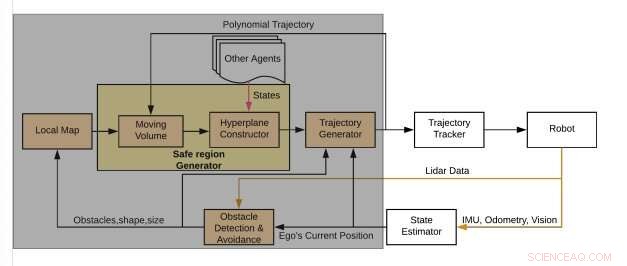
Systemöversikten för en enskild agent. De orange pilarna representerar rådata, rött representerar data från externa källor och svart representerar bearbetade data och flödessidan. Fokus för detta arbete är den skuggade delen. Kredit:Govind Aadithya R et al.
Teamet av forskare vid SRM Institute utvecklade en ny decentraliserad algoritm för bangenerering av multiagentsystem. Deras tillvägagångssätt följer en tvåstegsprocess, generera kollisionsfria konvexa områden som en robot kommer att vara begränsad i, genom att förutsäga andra robotars positioner.
"Vårt tillvägagångssätt har två delmål. Det första är identifiering av miljön, som inkluderar kartgenerering för jaget och bana förutsägelse för andra i miljön för att identifiera egots (ur fordonets synvinkel) säkra region, "Govind Aadithya R, en av forskarna som genomförde studien, Berättade för TechXplore. "Därefter kommer målet att navigera inom den säkra regionen för att nå önskad destination, för vilket vi genererar egots bana med tillgänglig information och omplanerar den regelbundet för att ta hänsyn till förändringar som sker runt egot. För att säkerställa att egot rör sig längs den angivna vägen, tillstånden spåras med hjälp av en trajectory tracker."
Govind och hans kollegor använde en enkel metod för att upptäcka hinder, använda lokala formbaserade kartor för att formulera säkra regioner för enskilda agenter. Baserat på dessa uppgifter, deras algoritm förutsäger banor för andra robotar och införlivar dessa i modellen för att undvika kollisioner genom att ändra storlek på de regioner där en robot kan navigera utan att kollidera.
"För mig, en av de mest meningsfulla aspekterna av detta arbete är att kontinuerlig kollisionskontroll är av yttersta vikt för säker kollisionsfri navigering, "Shravan Krishnan, en annan forskare involverad i studien, berättade för TechXplore. "Också, för att undvika kollisioner, vi fann att komplexa kartläggningstekniker inte är av yttersta vikt men är fortfarande en nödvändighet när man hanterar optimalt utnyttjande av utrymmet. Detta innebär att för konservativa manövrar, hinderrepresentationer baserade på enkel geometri räcker men för dynamiska och aggressiva manövrar som utnyttjar fullt utrymme, komplexa geometrier är en nödvändighet."
Forskarna utvärderade deras tillvägagångssätt i simuleringar på Gazebo-plattformen, använda ROS med platta flygrobotar och icke-holonomiska hjulförsedda robotar; i både korsningsliknande och ostrukturerade miljöer. Deras algoritm kunde effektivt generera jämna banor i begränsade miljöer, undvika kollisioner mellan robotar.
"För det här framåt, vi skulle vilja utöka algoritmen i 3D, lägga till ytterligare en dimension, "Vijay Arvindh B, en av forskarna som genomförde studien, berättade för TechXplore. "Vi arbetar för närvarande på de brister som måste åtgärdas för att kunna utvärdera algoritmen i 3D."
© 2019 Science X Network