Formkodad sammansättning av magnetiska mikroaktuatorer i form av ett mikrofordon. Kredit:Nature Materials, doi:10.1038/s41563-019-0407-3
Fältstyrd och självgående kolloidal enhet kan användas för att bygga mikromaskiner för att utföra komplexa rörelser och funktioner, även om deras integration som heterogena komponenter med specificerade strukturer, dynamik och funktioner inom mikromaskiner är utmanande. I en färsk studie om Naturmaterial , Yunus Alapan och medarbetare vid avdelningarna för fysisk intelligens och komplexa material i Tyskland och Schweiz beskrev den dynamiska självmonteringen av mobila mikromaskiner med önskade konfigurationer med hjälp av förprogrammerade fysiska interaktioner mellan strukturella och motoriska enheter.
De drev sammansättningen med hjälp av dielektroforetiska interaktioner (DEP) kodade i en tredimensionell form (3-D) av enskilda delar. De följde protokollet genom att montera de nya mikromaskinerna med magnetiska och självgående motordelar för omkonfigurerbar rörelse och ytterligare frihetsgrader som hittills inte har realiserats med konventionella monolitiska mikrorobotar. Den platsselektiva monteringsstrategin var mångsidig och kunde demonstreras på olika, omkonfigurerbar, hierarkiska och tredimensionella (3-D) mobila mikromaskiner. Forskarna förutser designprinciperna som presenteras i arbetet för att främja och inspirera utvecklingen av mer sofistikerade mikromaskiner integrerade i flerskaliga hierarkiska system.
Mobila mikromaskiner erbjuder betydande potential att undersöka och manipulera den mikroskopiska världen och skapa funktionell ordning/sammansättningar i mikro- och mesoskala. En mikromaskin kan bestå av flera delar, material eller kemi för att hantera flera funktioner, inklusive aktivering, avkänning, transport och leverans. Funktionslägen och prestanda hos en mikromaskin kan dikteras av den kollektiva organisationen och interaktionen mellan dess beståndsdelar.
Till exempel, magnetiska partiklar som interagerar under roterande magnetfält kan samlas till kedjor eller hjul som kan röra sig nära fasta ytor. Liknande, forskare har utvecklat ljusaktiverade mikrosimmare i levande kristaller och tillåtit självrotation genom att reglera kemikalieförbrukningen. För att designa högre komplexitet, bioingenjörer och materialvetare måste tillåta programmerbara fysiska interaktioner i enskilda delar för form- och materialspecifika åtgärder under yttre påverkan. Exempel inkluderar utvecklingen av kompositmikrostrukturer sammansatta som kolloider med hjälp av virtuella elektriska och magnetiska formar.
Medan nya tillvägagångssätt har visat lovande att bygga programmerbara strukturella sammansättningar, dessa återstår att översätta till mobila mikromaskinaggregat. I detta arbete, Alapan et al. introducerade en riktad monteringsprocess för att bygga mobila sammansatta mikromaskiner som använder dielektroforetiska (DEP) krafter för att koda exakt kontrollerad distribution av elektriska fältgradienter runt en kropp genom att modulera dess 3D-geometri.
Resultaten visade platsselektiva och riktade mikroaktuatorer med en mångsidig formkodad monteringsstrategi. De visade möjligheten till förbättrad förstärkning mellan ställdonen och kroppen genom att justera DEP-krafterna för att ge kontroll vid rotation. Alapan et al. implementerade en ny designstrategi för riktad montering för att styra operativ dynamik mellan funktionella komponenter med hjälp av formkodade DEP-krafter. Det experimentella arbetet kommer att ge ett rikt designutrymme för att utveckla funktionella mikromaskiner och mobila mikrobotar för att utföra komplexa uppgifter.
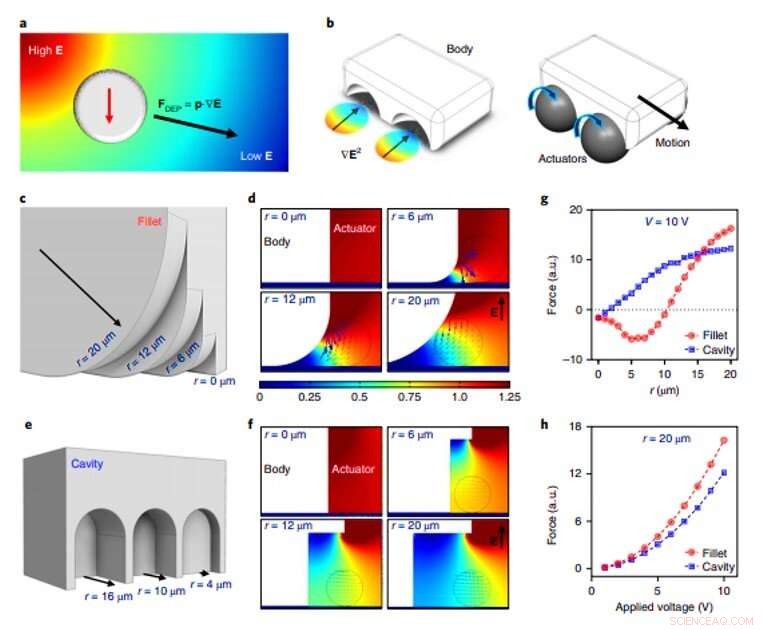
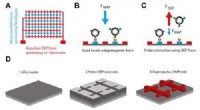
Rumslig kodning av DEP-attraktionsplatser genom att modulera 3D-geometrin. (a), En negativt polariserad partikel, med en lägre relativ permittivitet än mediet (εp<εm) upplever en DEP-kraft mot de lägre fältstorlekarna under ett ojämnt elektriskt fält. (b), DEP-krafter kan utnyttjas för den kodade sammansättningen av funktionella komponenter genom att kontrollera lokala elektriska fältgradienter som genereras runt en kropp genom dess geometri. (c–f), Olika 3D ytprofiler (filé eller kavitet) av en solid kropp ändrar den elektriska fältstyrkan runt kroppen (c, e), skapa lokala gradienter runt ytprofilerna beroende på funktionsdimensionen, r (d, f). Pilar representerar elektriska fältgradienter inuti det cirkulära området som representerar en mikroaktuator (10 µm diameter), som är placerad vid punkten för maximal kraft. Färgstapel normaliserad elektrisk fältstyrka (E/E0)2. (g, h), Negativt polariserade mindre ställdon upplever en DEP-kraft mot (F> 0) eller bort (F<0) från fördjupningen på grund av fältgradienten runt ytprofilen. Storleken och riktningen för DEP-kraften beror på profiltypen och egenskapsstorleken (g), samt den pålagda spänningen (h). Kredit:Nature Materials, doi:10.1038/s41563-019-0407-3
Alapan et al. programmerade först fältgradienterna runt en konstruktion för att driva sammansättningen av mikromaskindelar på önskade platser med hjälp av DEP-interaktioner. Arbetsprincipen för enheten under elektriska fält förlitade sig på den formberoende regleringen av elektriska fält runt polariserbara kroppar av den monterade mikromaskinen. För att programmera de lokala gradienterna, de undersökte hur icke-elektriska fält kunde moduleras kring olika geometrier.
Forskarna demonstrerade sedan kontrollerad självmontering av mobila mikromaskiner påverkade av elektriska fält, där de först fokuserade på monteringen av ett enkelt mikrofordon. Det experimentella mikrofordonet innehöll en stor icke-magnetisk dielektrisk sfärisk kropp och flera mindre magnetiska mikroaktuatorer organiserade runt den större kroppen. När de applicerade ett elektriskt fält i Z-axeln, den icke-magnetiska kroppen genererade lokala elektriska fältgradienter för att locka till sig mindre mikroaktuatorer runt sina poler. De nymonterade magnetiska ställdonen fungerade som drivhjul och Alapan et al. kunde styra mikrofordonet genom att ändra magnetfältets riktning genom att applicera ett vertikalt roterande magnetfält.
Medan de ökade hastigheten på mikrofordonet genom att öka antalet mikroaktuatorer, när spänningen i systemet ökade – sjönk hastigheten på mikrofordonet istället. Forskarna antog att detta berodde på ökad mekanisk koppling mellan mikropartiklarna och substratet under DEP-interaktioner. Forskarna använde metoden för att fånga slumpmässigt fördelade, icke-magnetiska partiklar med magnetiska mikroaktuatorer genom att applicera ett elektriskt fält, översatte dem sedan till en ny position med hjälp av ett roterande magnetfält för frigöring när det elektriska fältet stängdes av.
Montering och translation av ett sammansatt mikrofordon med magnetiska ställdon. Kredit:Nature Materials, doi:10.1038/s41563-019-0407-3
För att kontrollera mikrofordonets rotationsfrihetsgrader, Alapan et al. skulle kunna reglera styrkan hos de attraktiva DEP-krafterna mellan den passiva kroppen och mikroaktuatorerna för att ställa in deras mekaniska koppling. Till exempel, vid låga spänningar, de små attraktiva DEP-krafterna ledde till ett löst smörjbaserat kopplingsfenomen som gjorde att mikroaktuatorer kunde röra sig fritt runt stolpen. De roterande lederna som utvecklats i studien kan bli avgörande för specifika biologiska system under utvecklingen av syntetiska molekylära, nano- och mikromaskiner för tillämpning vid mekanisk överföring av energi.
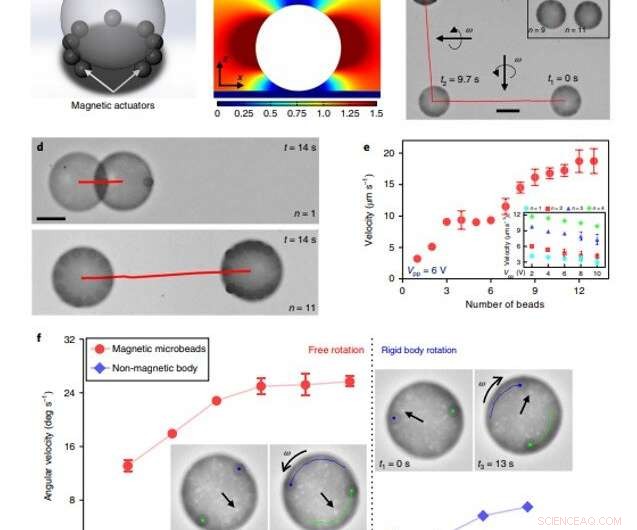
Reversibel montering av magnetiska mikroaktuatorer med en icke-magnetisk kropp med hjälp av DEP-krafter. (en, b), Flera magnetiska mikropartiklar (10 µm diameter) kan attraheras nära en sfärisk icke-magnetisk kropp (60 µm diameter) (a) mot områden med lägre elektrisk fältstyrka runt polerna (b). Färgstapel normaliserad elektrisk fältstyrka (E/E0)2. (c), Den sammansatta mikroroboten översätts via rullande rörelse av mikroaktuatorerna under ett roterande magnetfält (ω). Mikroroboten kan styras genom att ändra den applicerade magnetfältets riktning. Skalstång, 50 µm. Infälld, antalet magnetiska mikroaktuatorer (n) monterade runt kroppen kan ställas in genom kontrollerad infångning av mikroaktuatorer. (d, e), Antalet magnetiska mikroaktuatorer, såväl som den applicerade spänningen (insatt), bestämma hastigheten för de sammansatta mikrorobotarna. Skalstapel i d, 30 µm. (f), När ett rotationsmagnetfält i x–y-planet appliceras, ställdon roterar fritt runt den icke-magnetiska kroppen vid låga spänningar. Med ökad spänning, ställdon kopplas mekaniskt till den icke-magnetiska kroppen, vilket resulterar i mikrorobotens stela kroppsrotation. Felstaplar indikerar s.d. av tre experimentella replikat. Kredit:Nature Materials, doi:10.1038/s41563-019-0407-3
Forskarna insåg sedan programmerbar självmontering av mobila mikromaskiner med formkodade fysiska interaktioner genom att designa mikromaskinramar med specifika 3D-geometrier för att generera elektriska fältgradienter. 3D-ramverket lockade selektivt mikroaktuatorer till önskade platser på själva mikromaskinens ram som forskarna tillverkade med tvåfotonlitografi. För den första designen, forskarna skapade en mikrobil med fyrhjulsfickor för att generera DEP-krafter och styra sammansättningen av magnetiska mikroaktuatorer in i fickorna. De utförde på begäran självmontering av mikrobilen inom några sekunder efter att ett elektriskt fält applicerats för fri rotation av magnetiska hjul inuti fickorna som ett resultat av ett vertikalt roterande magnetfält. När de slog på det elektriska fältet till ett högt värde, de magnetiska mikroaktuatorerna självmonterade i dockningsplatserna för stel koppling mellan mikrorotorramen och magnetiska mikroaktuatorer. När de applicerade ett horisontellt roterande magnetfält, mikromotoraggregatet roterade som en stel kropp.
Forskarna utökade prototypen för att bygga omkonfigurerbara mikromaskiner som drivs av självgående mikromotorer. För detta, de designade mikromaskiner monterade med självgående Janus silica (SiO 2 ) mikropartiklar med guldlock (Au). Den frekvensberoende självframdrivningen och DEP-svaret hos Janus-mikropartiklarna gjorde det möjligt för dem att designa mobila mikromaskiner med omkonfigurerbar rumslig organisation och kinematik. Denna experimentella uppställning visade också en form av självreparation.

HÖGER:Formkodad omkonfigurerbar sammansättning av mikromaskiner med självgående mikroaktuatorer för frekvensjusterbar rörelse. (a), Janus SiO2 mikropartiklar med en Au cap kan aktivt röra sig baserat på sDEP vid höga frekvenser och ICEP vid låga frekvenser. Rörelseriktningen är mot Au cap i sDEP och backar i ICEP. (b), Janus-partikeln upplever en DEP-kraft mot högre och lägre elektriska fältstorlekar vid höga och låga frekvenser, respektive. (c–e), En mikrobilskaross med halvcylindriska och filéerade monteringsplatser är utformad för att generera frekvensavstämbar selektiv attraktion av mikromanöverdon. Janus-partiklarna attraheras mot halvcylindrarnas ekvatoriallinje vid höga frekvenser och mot den filéerade platsen vid låga frekvenser. Färgstapel normaliserad elektrisk fältstyrka (E/E0)2. Framdrivningen av Janus-partiklar monterade vid de hemicylindriska platserna resulterar i rotation av mikrobilens kaross, medan montering på den filéerade platsen genererar linjär translation. f, g, Omkonfigurering på begäran av rörelseläget uppnås genom att ställa in frekvensen och omorganisera den rumsliga layouten av sammansättningen. Skala staplar, 25 µm. VÄNSTER:Hierarkisk sammansättning av flera mikromaskiner via formkodade DEP-interaktioner. (a–c), Tvåstegs hierarkisk montering sker genom montering av mikromaskinenheter 1 och 2 med självgående Janus-partiklar (i) och genom lateral montering av enhet 1 och enhet 2 (ii). Mikromaskinenheter är designade för selektiv sidomontering, där undersidor av avsatser i den större enheten 2 genererar låga elektriska fält som attraherar den mindre enheten 1. Färgstapel normaliserad elektrisk fältstyrka (E/E0)2. (d, e), Parallell montering av mobila mikromaskiner upprätthåller enheternas linjära rörelse, medan antiparallell montering resulterar i rotationsrörelse. Skala staplar, 25 µm. Kredit:Nature Materials, doi:10.1038/s41563-019-0407-3
Alapan et al. utökade de observerade formkodade DEP-interaktionerna för att definiera fysiska interaktioner mellan de mobila mikromaskinerna genom att bana väg för hierarkiska flermaskinssammansättningar. Som ett principbevis, de designade en hierarkisk sammansättning på två nivåer mellan ingående mikromaskiner.
Forskarna utökade designen som introducerades i detta arbete till manipulation av 3D-mikroaktuatorer och montering av mikromaskiner med betydande potential för applicering på lab-on-a-chip-enheter för att underlätta kontinuerlig transport, sortering, digital manipulering av mikroobjekt och generering av mikroflöden. På det här sättet, Yunus Alapan och medarbetare designade och implementerade programmerbar självmontering med hjälp av formstyrd dynamisk sammansättning av mikromaskiner från modulära strukturella och motoriska subenheter för att ge oöverträffad kontroll över dynamik och funktioner. Metoden kan ge en lösning för att konstruera multifunktionella/materialmikrorobotar eftersom forskarna lyckades införliva de heterogena komponenterna för avkänning, lastning och aktivering tillsammans i ett enda steg.
För applikationer utan elektriska fält som in vivo biomedicinska applikationer, forskarna kommer att sträva efter att optimera och bygga vidare på den oåterkalleliga sammansättningen av mikrokomponenter för optimerad prestanda. Arbetet har betydande potential att utveckla multifunktionella, omkonfigurerbara mikromaskiner och livsinspirerade komplexa hierarkiska system inom materialvetenskap för tillämpningar inom mikrorobotik, kolloidal vetenskap, medicin och autonoma mikrosystem.
© 2019 Science X Network