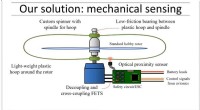
Experimentell utrustning för att studera myror som går liknande den som användes i studien. Kredit:David Baillot/University of California San Diego
Fysiken i att gå för flerbenta djur och robotar är enklare än man tidigare trott. Det är upptäckten som beskrivs av ett team av robotiker, fysiker och biologer i numret av den 5 september av Proceedings of the National Academy of Sciences, i en artikel med titeln "Att gå är som att glida:en förenande, datadriven syn på rörelse."
"Detta är viktigt eftersom det kommer att göra det möjligt för robotister att bygga mycket enklare modeller för att beskriva hur robotar går och rör sig genom världen", säger pappersmedförfattaren Nick Gravish, en fakultetsmedlem vid Institutionen för mekanisk och rymdteknik vid University of California San. Diego.
Forskarna hade tidigare studerat myrvandring och ville se hur deras fynd kunde tillämpas på robotar. I processen upptäckte de ett nytt matematiskt förhållande mellan att gå, hoppa, glida och simma i trögflytande vätskor för flerbenta djur och bots.
Teamet studerade flera kolonier av argentinska myror vid UC San Diego, och två olika typer av flerbensrobotar vid University of Michigan.
"Argentinska myror är väldigt lätta att studera i labbet", sa pappersmedförfattaren Glenna Clifton, en fakultetsmedlem vid University of Portland, som utförde det mesta av myrforskningen medan hon var postdoktor i Gravishs labb vid UC San Diego.
Argentina myror är bra vandrare som kan gå långa sträckor över olika terräng. Dessa myror vänjer sig också lätt till labbinställningar och bygger snabbt upp sina kolonier igen. Forskare kan sedan motivera dem att gå genom att placera mat på specifika platser. "Dessa myror kommer att sätta upp födosöksstigar och följa dem," sa Clifton. "De studsar tillbaka snabbt och de hyser inget agg."
För att studera dessa olika djur och robotar använde forskarna en algoritm som utvecklats av Shai Revzens forskargrupp vid University of Michigan, som förvandlar komplexa kroppsrörelser till former. "Denna algoritm tillåter oss att skapa ett enkelt förhållande mellan vilken hållning du är i och vart du ska flytta härnäst," sa Gravish.
Forskarna fann att samma algoritmer kunde tillämpas både på myror och de två olika typerna av robotar i studien, även om mängden glidrörelser när de går skiljer sig mycket åt. Argentinska myror halkar inte heller mycket när de går – bara 4,7 % av den totala rörelsen. Däremot är halkprocenten 12 % till 22 % för den sexbenta BigANT-roboten och 40 % till 100 % för multipod-robotarna med sex till 12 ben i studien, som ibland kryper.
Genom att använda den här modellen kan forskare förutsäga var insekten eller roboten kommer att röra sig härnäst, helt enkelt baserat på vilken hållning - eller form - de gör. "Detta ger en universell modell för lokalisering som gäller närhelst rörelsen domineras av friktion med omgivningen", skriver forskarna.
Matematiken som forskarna använde är inte ny. Men man förstod att matematiken bara gällde glidning och simning i trögflytande vätskor. Teamet visade att samma ekvationer gäller för flerbensgång, oavsett om vandrare halkar eller inte. Dessutom gäller samma regler från millimeterskaliga insekter, som myror, till meterskaliga robotar. En tidig version av papperstiteln var "gå som en mask".
"Universaliteten av detta tillvägagångssätt kan ha tillämpningar inom robotdesign och rörelseplanering, och ger insikt i utvecklingen och kontrollen av benrörelse," skriver forskarna.
Forskare antar att dessa universella principer kan ha implikationer för att förstå stora evolutionära övergångar, till exempel från simning till promenader. Med tanke på att gång, även med halka, följer samma allmänna kontrollprinciper som trögflytande simning, kan tidiga landdjur redan ha haft de neurala kretsar som behövs för förflyttning på land.

Forskarna Glenna Clifton, från University of Portland, och Nick Gravish, från University of California San Diego, skördar myror på UC San Diego campus. Kredit:David Baillot/University of California San Diego
Forskare studerade inte tvåbenta varelser, men modellen skulle gälla dem så länge de rör sig långsamt, har båda fötterna på marken samtidigt och inte faller. (Föreställ Michael Jackson på månpromenaden.)
Teamet har fortfarande mer att finjustera, för att till exempel förstå vilken roll friktionskrafter spelar i modellen.
"Oavsett vilket kan promenader vara mycket enklare än vi vanligtvis tror," sa Gravish. + Utforska vidare