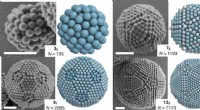
För att förstå deras strategier för att arbeta effektivt utan att täppa till trafikstockningar, forskare studerade hur brandmyror grävde tunnlar i glaspartiklar som simulerade jord. Upphovsman:Rob Felt, Georgia Tech
För myror och robotar som arbetar i trånga utrymmen som tunnlar, att ha fler arbetare betyder inte nödvändigtvis att få mer arbete gjort. Precis som för många kockar i ett kök kommer i vägen för varandra, att ha för många robotar i tunnlar skapar träskor som kan stoppa arbetet.
En studie publicerad 17 augusti i tidskriften Vetenskap visar att i brandmyrkolonier, ett litet antal arbetare gräver mest, låt de andra myrorna se något mindre ut än flitiga. För grävning av bostunnlar, detta mindre upptagna tillvägagångssätt får jobbet gjort utan myrstrafik - vilket garanterar ett smidigt utgrävningsflöde. Forskare fann att tillämpningen av myroptimeringsstrategin på autonoma robotar undviker mekaniserade träskor och får arbetet gjort med minst energi.
Optimera aktiviteten för autonoma underjordiska robotar kan vara användbart för uppgifter som katastrofåterställning, gruvdrift eller till och med gräva underjordiska skyddsrum för framtida planetutforskare. Forskningen stöddes av National Science Foundation's Physics of Living Systems -program, arméns forskningskontor och familjeprofessorn i Dunn.
"Vi märkte att om du har 150 myror i en behållare, bara 10 eller 15 av dem kommer faktiskt att gräva i tunnlarna vid varje given tidpunkt, "sa Daniel Goldman, professor i fysikskolan vid Georgia Institute of Technology. "Vi ville veta varför, och att förstå hur grundläggande fysikaliska lagar kan fungera. Vi hittade en funktionell, samhällsnytta för denna till synes ojämlikhet i arbetsmiljön. Utan det, att gräva blir bara inte klart. "
Genom att övervaka aktiviteterna hos 30 myror som hade målats för att identifiera varje individ, Goldman och kollegor, inklusive tidigare postdoktor Daria Monaenkova och Ph.D. student Bahnisikha Dutta, upptäckte att bara 30 procent av myrorna utförde 70 procent av arbetet - en ojämlikhet som verkar hålla arbetet nynande längs med. Dock, det beror tydligen inte på att de mest trafikerade myrorna är de mest kvalificerade. När forskarna tog bort de fem hårdast arbetande myrorna från boet, de såg ingen produktivitetsminskning när de återstående 25 fortsatte att gräva.
Att ha bo är viktigt för att skjuta myror, och om en koloni förskjuts - av en översvämning, till exempel - det första myrorna kommer att göra när de når torrt land är att börja gräva. Deras tunnlar är smala, knappt tillräckligt bred för att två myror ska passera, en designfunktion som antas ge rörelsefördelar i utvecklingen av vertikala tunnlar. Fortfarande, myrorna vet hur man undviker att skapa träskor genom att dra sig tillbaka från tunnlar som redan är upptagna av andra arbetare - och ibland genom att inte göra någonting alls.
För att undvika träskor och maximera grävningen i frånvaro av en ledare, robotar byggda av Goldmans magisterstudent Vadim Linevich programmerades för att fånga aspekter av dawdling och retreating myror. Forskarna fann att så många som tre robotar kunde arbeta effektivt i en smal horisontell tunnel som grävde 3D-tryckta magnetiska plastbollar som simulerade klibbig jord. Om en fjärde robot kom in i tunneln, dock, som producerade en täppa som helt stoppade arbetet.
"När vi satte in fyra robotar i en begränsad miljö och försökte få dem att gräva, de fastnade genast, "sa Goldman, som är familjeprofessorn Dunn vid Fysikhögskolan. "Medan jag observerade myrorna, vi blev förvånade över att se att individer ibland skulle gå till tunneln och om de stötte på till och med en liten mängd täppa, de skulle bara vända och dra sig tillbaka. När vi sätter dessa regler i kombinationer med robotarna, som skapade en bra strategi för att gräva snabbt med låga energianvändningar per robot. "

Robotar byggda i laboratoriet av professor Daniel Goldman vid Georgia Tech gräver 3D -tryckta sfärer som är utformade för att simulera den fuktiga jorden där myror gräver. Upphovsman:Rob Felt, Georgia Tech
Experimentellt, forskargruppen testade tre potentiella beteenden för robotarna, som de kallade "ivriga, "" vändning "eller" lat. "Med den ivriga strategin, alla fyra robotar störtade in i arbetet - och fastnade snabbt. I omvändningsbeteendet, robotar gav upp och vände sig om när de stötte på förseningar på arbetsplatsen. I lat strategi, dawdling uppmuntrades.
"Ivrig är den bästa strategin om du bara har tre robotar, men om du lägger till en fjärde, att beteende tankar för att de kommer i vägen för varandra, "sa Goldman." Reversal ger relativt sunt och vettigt grävande. Det är inte den snabbaste strategin, men det finns inga sylt. Om du tittar på förbrukad energi, lat är den bästa kursen. "Analystekniker baserade på glasartade och underkylda vätskor, ledd av tidigare doktorand student Jeffrey Aguilar, gav insikt i hur de olika strategierna mildrar och förhindrar täppbildande kluster.
För att förstå vad som hände och experimentera med parametrarna, Goldman och kollegor - inklusive Will Savoie, en Georgia Tech Ph.D. studerande, Forskningsassistent Hui-Shun Kuan och professor Meredith Betterton från School of Physics vid University of Colorado i Boulder-använde datormodellering känd som mobilautomater som har likheter med hur trafikingenjörer modellerar rörelser för bilar och lastbilar på en motorväg.
"På motorvägar, för få bilar ger inte mycket flöde, medan för många bilar skapar ett stopp, "Goldman sa." Det finns en mellanliggande nivå där det är bäst, och det kallas det grundläggande diagrammet. Från vår modellering, vi lärde oss att myrorna fungerar precis vid diagrammets topp. Den rätta blandningen av ojämlika arbetsfördelningar och omvändningsbeteenden har fördelen av att hålla dem i rörelse med maximal effektivitet utan att fastna. "

Georgia Tech -forskare använde 3D -trycktekniker för att skapa ihåliga sfärer där lösa magneter placerades. Sfärerna simulerade fuktig jord för att testa myrors arbetsstrategier. Upphovsman:Rob Felt, Georgia Tech
Forskarna använde robotar som designats och byggts för forskningen, men de matchade inte myrornas förmåga. Myrorna är flexibla och robusta, kunna klämma förbi varandra i begränsningar som skulle få de oflexibla robotarna att fastna. I vissa fall, robotarna i Goldmans labb skadade till och med varandra medan de rusade i läge för grävning.
Forskningsresultaten kan vara användbara för utforskning av rymden där tunnlar kan behövas för att snabbt skydda människor från närmande dammstormar eller andra hot. "Om du var en robotsvärm på Mars och behövde gräva djupt för att komma undan dammstormar, denna strategi kan hjälpa till att ge skydd utan att ha perfekt information om vad alla gjorde, "Förklarade Goldman.
Utöver de potentiella robotapplikationerna, arbetet ger insikter i myrornas komplexa sociala färdigheter och ökar förståelsen av aktiv materia.
"Myror som lever i komplexa underjordiska miljöer måste utveckla sofistikerade sociala regler för att undvika de dåliga saker som kan hända när du har många individer i en trång miljö, "Goldman sa." Vi bidrar också till att förstå fysiken för uppgiftsorienterad aktiv materia, lägga mer experimentell kunskap i fenomen som svärmar. "