Eftersom objektidentifiering och tredimensionella (3D) rekonstruktionstekniker blir väsentliga inom olika områden för omvänd ingenjörskonst, artificiell intelligens, medicinsk diagnostik och industriell produktion, finns det ett ökande fokus på att söka mycket effektiva, snabbare och mer integrerade metoder som kan förenkla bearbetning.
Inom det aktuella området för objektidentifiering och 3D-rekonstruktion utförs extrahering av provkonturinformation i första hand av olika datoralgoritmer. Traditionella datorprocessorer lider av flera begränsningar, såsom hög strömförbrukning, låghastighetsdrift och komplexa algoritmer. I detta avseende har det nyligen blivit en växande uppmärksamhet när det gäller att söka efter alternativa optiska metoder för att utföra dessa tekniker.
Utvecklingen av optisk beräkningsteori och bildbehandling har gett en mer komplett teoretisk grund för objektidentifiering och 3D-rekonstruktionstekniker. Optiska metoder har fått mer uppmärksamhet som ett alternativt paradigm än traditionella mekanismer de senaste åren på grund av deras enorma fördelar med ultrasnabb drifthastighet, hög integration och låg latens.
Som tvådimensionella nanostrukturer konstruerade på subvåglängdsskalor, har metasytor uppvisat anmärkningsvärda egenskaper i den revolutionerande utvecklingen inom optik, som effektivt kan förenkla och djupt integrera fotavtrycket hos optiska system.
I praktiska tillämpningar har metasytor visat förmågan att effektivt manipulera flera parametrar av ljus. Som ett resultat används metasytor inom många potentiella områden, såsom optisk analog beräkning, optisk kryptografi, design av optiska enheter, signalmanipulation, mikroskopi, optisk bildbehandling och nanomålning.
Som en tvådimensionell konstgjord komponent har den optiska beräkningsmetaytan visat den övernaturliga karaktären av att kontrollera fas, amplitud, polarisation och frekvensfördelningar av ljusstrålen, som kan utföra matematiska operationer på ingångsljusfältet.
Nyligen föreslog forskargruppen av professorer Hailu Luo vid School of Physics and Electronics vid Hunan University i Kina en helt optisk objektidentifiering och 3D-rekonstruktionsteknik baserad på optiska beräkningsmetasytor. Till skillnad från traditionella mekanismer minskar detta schema minnesförbrukningen vid bearbetningen av konturytextraktionen. Identifieringen och rekonstruktionen av experimentella resultat från objekt med hög kontrast och låg kontrast stämmer väl överens med de verkliga objekten. Utforskningen av helt optisk objektidentifiering och 3D-rekonstruktionstekniker ger potentiella tillämpningar av hög effektivitet, låg förbrukning och kompakta system.
Författarna till artikeln, publicerad i Opto-Electronic Advances , föreslå en helt optisk objektidentifiering och 3D-rekonstruktionsteknik baserad på optisk beräkningsmetayta. Genom att designa och tillverka en optisk beräkningsmetayta realiseras helt optisk objektidentifiering och 3D-rekonstruktion av hög- och lågkontrastobjekt.
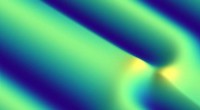
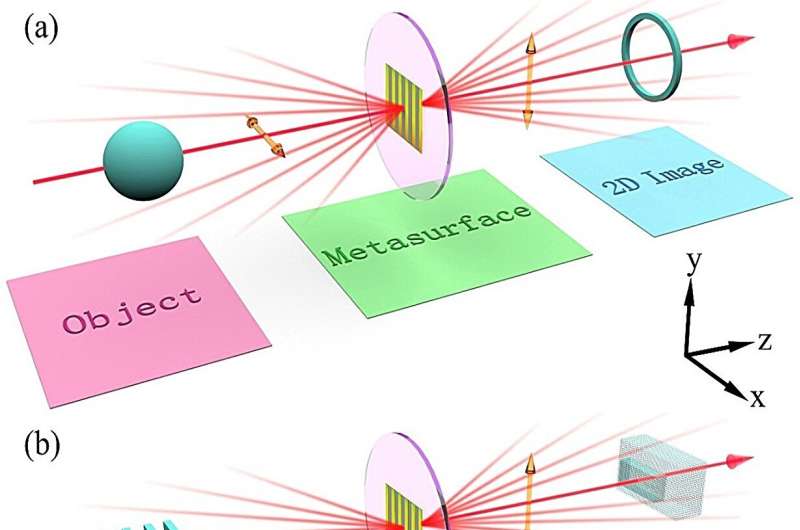
Till skillnad från den tidigare metasytbaserade 3D-avbildningsforskningen, bygger denna metod på optisk analog beräkning för att erhålla konturinformation för objekt och kan uppnå objektidentifiering och 3D-rekonstruktion av både högkontrast- och lågkontrastobjekt, vilket kan ge en unik tillämpning av metasytebaserad optisk analog beräkning. Principen för objektidentifieringssystemet illustreras schematiskt i fig. 1(a).
När det observerade objektet läggs till systemet, kan systemet mata ut konturinformationen om objektet med hjälp av den helt optiska metoden. Objektidentifieringsförmågan hos detta system kan också utökas till den helt optiska 3D-rekonstruktionstekniken. Genom att rekombinera olika projektionsbilder av det observerade objektet kan en 3D-modell av det observerade objektet erhållas, oavsett om det är ett objekt med hög kontrast eller ett objekt med låg kontrast [Fig. 1(b)].
Teoretiskt sett kan 3D-konturytan hos ett högkontrastobjekt betraktas som en överlagring av oändliga tvådimensionella konturer. Därför, för objekt med hög kontrast, föreslås rotationsmetoden och skivmetoden för att erhålla 3D-rekonstruktion. För objekt med låg kontrast kan 3D-rekonstruktionsmodellen förvärvas genom att bryta tekniken för ortogonal polarisationstillstånd.

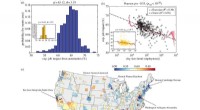
För att bekräfta genomförbarheten av 3D-rekonstruktionen i ovanstående schema, tas en sfär i Fig. 2(a) som ett exempel. Genom att rotera objektet med lika intervall i det optiska systemet kan flera konturresultat av objektet på olika projektionsplan fångas av CCD-kameran, som visas i fig. 2(b). Slutligen kan 3D-experimentell rekonstruktionsmodell av högkontrastobjektet rekonstrueras genom att omarrangera och kombinera hela konturinformationen [Fig. 2(c)].
I Fig. 3(d)–3(e), korianderfrö, svampmodell och lollipopmodell har använts för att demonstrera denna rekonstruerade process. Teoretiskt sett, ju mindre avståndsvinkeln är, desto mer exakt är den rekonstruerade modellen. Som proof-of-concept-demonstrationer, endast genom att använda de begränsade konturerna för att illustrera genomförbarheten av detta schema för 3D-rekonstruktion, visar experimentresultaten att denna teknik är underlättande och korrekt.
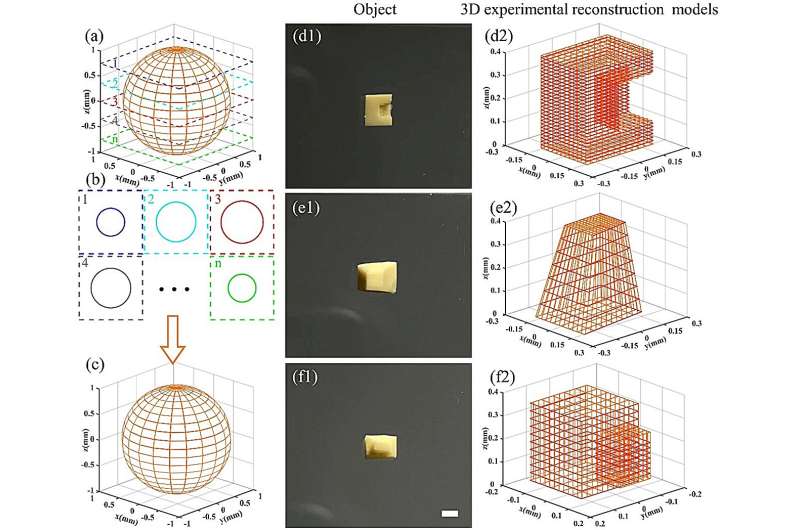
Utan förlust av generalitet fokuserar forskargruppen på högkontrastobjekt med komplexa konturytor. För vissa högkontrastobjekt med komplexa ytor är 3D-rekonstruktionsmetoden genom att rotera objekt inte längre tillämplig. Därför föreslog denna grupp en annan 3D-rekonstruktionsmetod genom att skära upp objekt. Med en sfär i fig. 3(a) som ett exempel, skärs objekt i små intervall, och flera konturresultat av objektet på olika projektionsplan kan fångas av en CCD-kamera, som visas i fig. 3(b).
Slutligen kan 3D-experimentell rekonstruktionsmodell av högkontrastobjektet rekonstrueras genom att omarrangera och kombinera hela konturinformationen [Fig. 3(c)]. Teoretiskt sett gäller att ju högre precision skärningsprocessen har, desto mer exakt kommer den rekonstruerade 3D-modellen att vara. Som proof-of-concept-demonstrationer har några enkla geometrier med distinkta egenskaper, såsom groove, landing, och boss använts för att verifiera detta experiment i Fig. 3(dl)–3(f1).
Genom att dela upp dessa tre objekt för att erhålla deras konturinformation på olika plan, omarrangera och kombinera denna konturinformation och slutligen erhålla den experimentella 3D-rekonstruktionsmodellen om dem i Fig. 3(d2)–3(f2). Oavsett om det är ett spår med en skåra på insidan, ett upphöjt nav på utsidan eller en fasad landning, så stämmer formerna och storlekarna på 3D-experimentella rekonstruktionsmodeller väl överens med originalobjekten. Denna metod har potentiell tillämpning för 3D-rekonstruktion av objekt med komplexa ytor eller inre strukturer.
Genom att utforska tillämpningen av ett helt optiskt analogt datorsystem baserat på optisk beräkningsmetayta, föreslås och realiseras en optisk objektidentifiering och 3D-rekonstruktionsteknik för objekt med hög och låg kontrast. Detta arbete förväntas tillämpas på fröscreening, yttopografidetektion och kvantitativ mikroskopisk 3D-rekonstruktion, denna forskning kommer att ge en unik riktning för bildbehandling och industriell detektion.
Mer information: Dingyu Xu et al, Alloptisk objektidentifiering och tredimensionell rekonstruktion baserad på optisk beräkningsmetayta, Opto-Electronic Advances (2023). DOI:10.29026/oea.2023.230120
Tillhandahålls av Compuscript Ltd