Ett team under ledning av professor Sylvain Martel vid Polytechnique Montréal Nanorobotics Laboratory har utvecklat ett nytt tillvägagångssätt för att ta itu med en av de största utmaningarna med endovaskulär kirurgi:hur man når de mest svåråtkomliga fysiologiska platserna. Deras lösning är en robotplattform som använder det fransfält som genereras av den supraledande magneten i en skanner för klinisk magnetisk resonanstomografi (MRI) för att guida medicinska instrument genom djupare och mer komplexa kärlstrukturer. Tillvägagångssättet har framgångsrikt demonstrerats in vivo. Kredit:Massouh bioMEDia för Polytechnique Montréal Nanorobotics Laboratory
Ett team under ledning av professor Sylvain Martel vid Polytechnique Montréal Nanorobotics Laboratory har utvecklat ett nytt tillvägagångssätt för att ta itu med en av de största utmaningarna med endovaskulär kirurgi:hur man når de mest svåråtkomliga fysiologiska platserna. Deras lösning är en robotplattform som använder det fransfält som genereras av den supraledande magneten i en skanner för klinisk magnetisk resonanstomografi (MRI) för att guida medicinska instrument genom djupare och mer komplexa kärlstrukturer. Tillvägagångssättet har framgångsrikt demonstrerats in vivo , och är föremål för en artikel som just publicerats i Vetenskapsrobotik .
När en forskare "tänker utanför ramarna" — bokstavligen
Föreställ dig att behöva trycka en tråd så tunn som ett människohår djupare och djupare inuti en mycket lång, mycket smalt rör fullt av vändningar. Trådens brist på styvhet, tillsammans med friktionskrafterna som utövas på rörets väggar, kommer så småningom att göra manövern omöjlig, med tråden som slutar ihopvikt på sig själv och fast i ett varv på röret. Detta är exakt utmaningen för kirurger som försöker utföra minimalt invasiva ingrepp i allt djupare delar av människokroppen genom att styra en styrtråd eller annan instrumentering (som en kateter) genom smala, slingrande nätverk av blodkärl.
Det är möjligt, dock, att utnyttja en riktad dragkraft för att komplettera tryckkraften, motverka friktionskrafterna inuti blodkärlet och flytta instrumentet mycket längre. Spetsen på enheten är magnetiserad, och drogs med inuti kärlen av attraktionskraften från en annan magnet. Endast en kraftfull supraledande magnet utanför patientens kropp kan ge den extra attraktion som behövs för att styra den magnetiserade enheten så långt som möjligt. Det finns en del modern sjukhusutrustning som kan spela den rollen:en MR-skanner, som har en supraledande magnet som genererar ett fält som är tiotusentals gånger starkare än jordens.
Magnetfältet inuti tunneln på en MRI-skanner, dock, är enhetlig; detta är nyckeln till hur patientavbildning utförs. Denna enhetlighet utgör ett problem:att dra spetsen av instrumentet genom de labyrintiska kärlstrukturerna, det styrande magnetfältet måste moduleras till största möjliga amplitud och sedan minskas så snabbt som möjligt.
Funderar på det problemet, Professor Martel hade idén att inte använda det huvudsakliga magnetfältet som finns inuti MRI-maskintunneln, men det så kallade fransfältet utanför maskinen. "Tillverkare av MRI-skannrar kommer normalt att reducera kantfältet till ett minimum, " förklarar han. "Resultatet är ett fält med mycket hög amplitud som avklingar mycket snabbt. För oss, det fransfältet representerar en utmärkt lösning som är vida överlägsen de bästa befintliga magnetiska vägledningsmetoderna, och det är i ett perifert utrymme som gynnar ingrepp i mänsklig skala. Som vi förstår det, detta är första gången som ett MR-fransfält har använts för en medicinsk tillämpning, " han lägger till.
Flytta patienten snarare än fältet
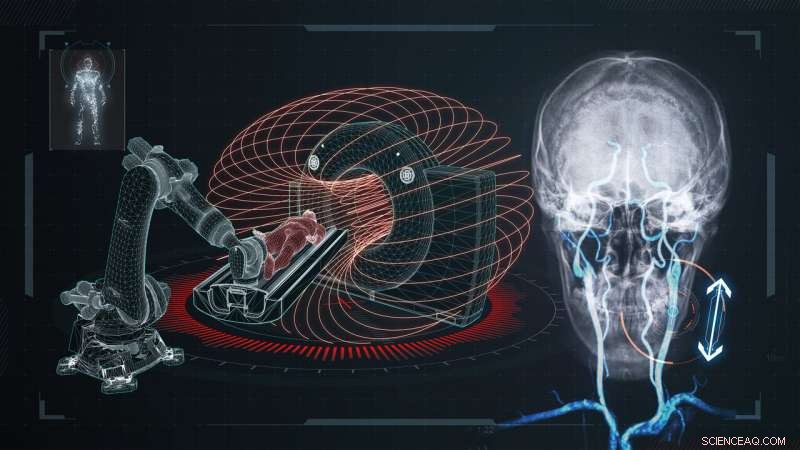
För att styra ett instrument djupt inne i blodkärlen, inte bara krävs en stark attraktionskraft, men den kraften måste vara orienterad för att dra den magnetiska spetsen på instrumentet i olika riktningar inuti kärlen. På grund av MRI-skannerns storlek och vikt, det är omöjligt att flytta det för att ändra riktningen på magnetfältet. För att komma runt problemet, patienten flyttas istället i närheten av MR-maskinen. Plattformen som utvecklats av professor Martels team använder ett robotbord som är placerat i kantfältet bredvid skannern.
Bordet, designad av Arash Azizi – huvudförfattaren till artikeln och en biomedicinsk ingenjörsdoktor. kandidat vars avhandlingsrådgivare är professor Martel—kan röra sig på alla axlar för att positionera och orientera patienten enligt den riktning i vilken instrumentet måste styras genom kroppen. Tabellen ändrar automatiskt riktning och orientering för att positionera patienten optimalt för de på varandra följande stadierna av instrumentets resa tack vare ett system som kartlägger riktningskrafterna i MR-skannerns magnetfält – en teknik som professor Martel har kallat Fringe Field Navigation (FFN).
Ett in vivo studie av FFN med röntgenkartläggning visade kapaciteten hos systemet för effektiv och minimalt invasiv styrning av instrument med extremt liten diameter djupt inne i komplexa kärlstrukturer som hittills varit otillgängliga med kända metoder.
Robotar till undsättning för kirurger
Denna robotlösning, som avsevärt överträffar manuella procedurer såväl som befintliga magnetfältsbaserade plattformar, möjliggör endovaskulära interventionsprocedurer i mycket djupa, och därför för närvarande otillgänglig, regioner av människokroppen.
Metoden lovar att bredda möjligheterna för tillämpning av olika medicinska procedurer inklusive diagnos, avbildning och lokala behandlingar. Bland annat, det skulle kunna hjälpa kirurger i procedurer som kräver minsta möjliga invasiva metoder, inklusive behandling av hjärnskador såsom aneurysm eller stroke.