Ett forskarteam från Cornell har utvecklat ett nytt sätt att designa komplexa maskiner i mikroskala, ett som hämtar inspiration från driften av proteiner och kolibrinäbbar.
Gruppens artikel, "Bifurcation Instructed Design of Multistate Machines", publicerad i Proceedings of the National Academy of Sciences . Huvudförfattaren är Itay Griniasty, en Schmidt AI-postdoktor i labbet av Itai Cohen, professor i fysik vid College of Arts and Sciences.
Att bygga mindre och mindre maskiner är inte bara en fråga om att krympa komponenterna. Medan makroskopiska maskiner vanligtvis är utformade för att delas in i fack, dela upp en uppgift i små bitar och tilldela var och en till en annan del av maskinen, har proteiner - de huvudsakliga mikroskopiska maskinerna som ansvarar för mycket av biologin - en annan design. Uppgifter uppnås ofta genom koordinerad rörelse av alla proteinets komponenter, vilket gör dem mer robusta mot kaoset i den mikroskopiska världen.
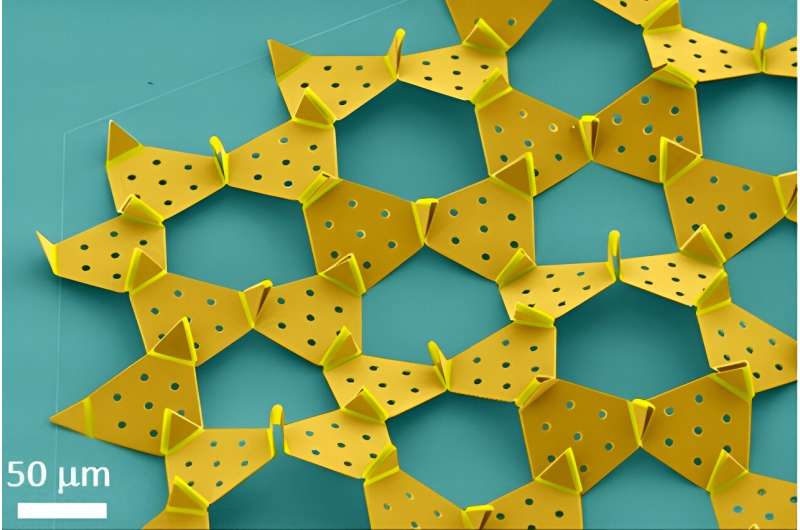
Tidigare har Cohens grupp använt origamiprinciper för att tillverka ett stall av mikroskaliga enheter, från självvikbara strukturer till gående mikrorobotar, som är innovativa för sin storlek men relativt grundläggande i funktion. Att lägga till funktionalitet i origami-ark visar sig vara en utmanande uppgift.
"Maskinerna som vi har tillverkat hittills är väldigt, väldigt enkla. Men när vi börjar fundera på hur vi kan öka funktionaliteten i system som är starkt kopplade, började vi inse att varje gång du flyttar en del av maskinen, andra delar rör sig, säger Cohen. "Det är irriterande, för du kan inte isolera någonting, allt hänger ihop i de här arken. Sedan började vi fråga hur detta går till i den mikroskopiska världen."
Ett protein, sa de, skulle kunna ses som ett maskinhoppande mellan stater som svar på små förändringar av några parametrar. Forskarna inspirerades av ett exempel på denna typ av funktionalitet i makroskala:kolibrien.
En studie från 2010 av Andy Ruina, John F. Carr-professorn i maskinteknik, visade hur en kolibriens näbb kan "smidigt öppnas och sedan knäppas igen genom en lämplig sekvens av böjnings- och vridningsåtgärder av musklerna i underkäken."
Detta system förklaras av en matematisk idé som kallas en cusp-bifurkation, där näbben, beroende på krafterna som utövas av käkmusklerna, kan ha ett enda stabilt tillstånd, d.v.s. stängt, eller två stabila tillstånd, både öppet och stängt. Den punkt där det enda stabila tillståndet delas upp i två stabila tillstånd är cuspbifurkationen.
Fördelen med att arbeta runt en cusp-bifurkation är att den ger ett par viktiga designegenskaper. Det första är topologiskt skydd – som säkerställer konsistens i en enhets prestanda, så att om käkmusklerna drar något annorlunda, kan näbben fortfarande öppnas och stängas. Det andra är en spakfördel, som ser till att musklerna bara behöver röra sig lite för att aktivera en stor förändring i näbben. Dessa är exakt de komponenter som krävs för att uppnå funktion i mikroskala.
Cohen, Griniasty och deras samarbetspartners undrade om de kunde öka antalet stater organiserade kring en bifurkation från två – dvs öppna och stängda – till dussintals eller möjligen hundratals. Denna tillägg skulle möjliggöra design av maskiner som utför komplexa funktioner.
"Istället för att sammansätta fackindelad funktion, skulle dessa förmågor komma från hela objektet," sa Griniasty. "Det är att dansa tillsammans."
Forskarna rekryterade Teaya Yang '22 och Yuchao Chen '19, båda medförfattare, för att skapa en proof-of-concept makroskala magneto-elastisk modell med en fjärilsförgrening som gjorde att systemet kunde knäppa eller smidigt övergå mellan tre stabila tillstånd. Modellen bestod av två paneler, varav den ena rörde sig i ett plan medan den andra var fri att rotera kring ett fast gångjärn. Varje panel var dekorerad med nio magneter som interagerade med varandra, vilket skapade komplexa interaktioner som påminner om de som finns i proteiner.
En central utmaning var dock att hitta en metod för att designa magnetiska mönster som skulle stimulera den önskade bifurkationen. Griniasty och David Hathcock, Ph.D. '22 övervann problemet genom att utveckla en algoritm som byggde på det dynamiska systemarbetet av John Guckenheimer, A.R. Bullis professor emeritus i matematik (A&S).
"Om vi försökte bara gissa dessa magnetiska mönster, för att generera flera jämvikter, skulle vi få slut på datorkraft," sa Cohen. "Så Itay designade en mycket trevlig algoritm som förenklar sökningen."
Nästa steg blir att demonstrera konceptet i mikroskala.
"För en 100-mikrons maskin, som de typiska robotarna som vi gör, beräknade Itay att vi kunde uppnå 20 separata tillstånd," sa Cohen. "Det är typ vad vi föreställer oss skulle kunna göras i mikroskala, en maskin där jag använder ett ställdon för att flytta en av panelerna, och konfigurationen av hela maskinen kan växla mellan 20 olika konfigurationer. Du kan ha en maskin som kan, låt oss säga, kör genom vätska, eller kanske gör en komplicerad grepphandling."
Mer information: Teaya Yang et al, Bifurcation instruerade design av flertillståndsmaskiner, Proceedings of the National Academy of Sciences (2023). DOI:10.1073/pnas.2300081120
Journalinformation: Proceedings of the National Academy of Sciences
Tillhandahålls av Cornell University