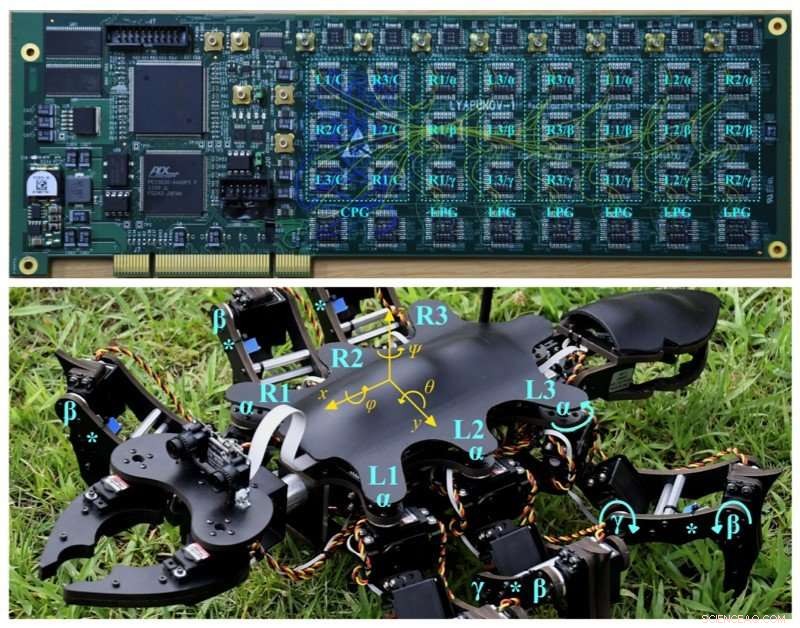
Vy över kretskortet som implementerar styrenheten och av roboten. (Återges med tillstånd från publicerad artikel). Kredit:IEEE ACCESS
En studie ledd av forskare vid Tokyo Institute of Technology (Tokyo Tech) har avslöjat nya sätt att köra robotar med flera ben med hjälp av en tvånivåstyrenhet. Den föreslagna styrenheten använder ett nätverk av så kallade icke-linjära oscillatorer som möjliggör generering av olika gångarter och ställningar, som endast specificeras av ett fåtal högnivåparametrar. Studien inspirerar till ny forskning om hur flerbensrobotar kan styras, även i framtiden genom att använda hjärn-dator-gränssnitt.
I den naturliga världen, många arter kan gå över sluttningar och oregelbundna ytor, nå platser otillgängliga även för de mest avancerade roverrobotarna. Det förblir ett mysterium hur komplexa rörelser hanteras så sömlöst av även de allra minsta varelserna.
Vad vi vet är att även de enklaste hjärnorna innehåller mönstergeneratorkretsar (CPGs), som är kopplade specifikt för att generera gångmönster. Försök att replikera sådana kretsar på konstgjord väg har hittills haft begränsad framgång, på grund av dålig flexibilitet.
Nu, forskare i Japan och Italien föreslår ett nytt tillvägagångssätt för att skapa gångmönster, baserat på ett hierarkiskt nätverk av elektroniska oscillatorer arrangerade över två nivåer, vilket de har demonstrerat med hjälp av en myrliknande hexapodrobot. Prestationen öppnar nya vägar för kontroll av robotar med ben. Publicerad i IEEE Access , forskningen är resultatet av samarbete mellan forskare från Tokyo Tech, delvis finansierat av World Research Hub Initiative, polska vetenskapsakademin i Krakow, Polen, och universitetet i Catania, Italien.
Den biologiskt inspirerade styrenheten består av två nivåer. På toppen, den innehåller en CPG, ansvarig för att kontrollera den övergripande sekvensen av benrörelser, känd som gång. På botten, den innehåller sex lokala mönsterritare (LPG), ansvarig för att kontrollera banorna för de enskilda benen.
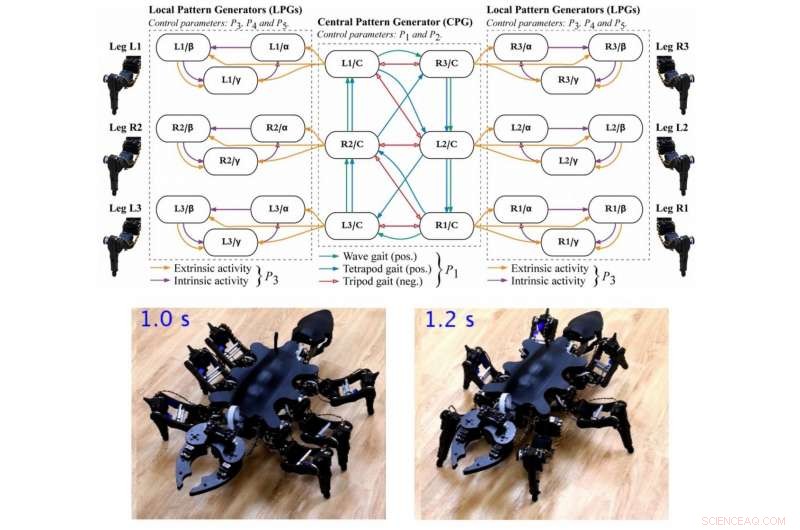
Överst:Styrenhetens arkitektur, visar den centrala mönstergeneratorn, som styr det övergripande gångmönstret, och på båda sidor, de sex lokala mönsterritarna, som styr individuella benbanor. Nederst:Representativa stillbilder av roboten som går i en myrliknande hållning (vänster) och en kackerlackaliknande hållning (höger). Kredit:IEEE ACCESS
Huvudförfattaren till studien, Ludovico Minati, som också är ansluten till den polska vetenskapsakademin i Krakow, Polen och inbjudna till Tokyo Techs Institute of Innovative Research (IIR) genom World Research Hub Initiative förklarar att insekter snabbt kan anpassa sin gång beroende på en lång rad faktorer, men särskilt deras gånghastighet. Vissa gångarter observeras ofta och anses vara kanoniska, men i verkligheten, ett nästan oändligt antal gångarter är tillgängliga, och olika insekter som myror och kackerlackor inser liknande gångarter i väldigt olika ställningar.
Svårigheter har stött på när man försöker kondensera så mycket komplexitet till artificiella mönsterritare. Den föreslagna styrenheten visar en extremt hög nivå av mångsidighet tack vare implementering baserad på fältprogrammerbara analoga arrayer (FPAAs), som möjliggör on-the-fly omkonfigurering och inställning av alla kretsparametrar. Den bygger på år av tidigare forskning om icke-linjära och kaotiska elektroniska nätverk, som har visat sin förmåga att replikera fenomen som observerats i biologiska hjärnor, även när den är uppkopplad i mycket enkla konfigurationer.
"Det kanske mest spännande ögonblicket i forskningen var när vi observerade roboten uppvisa fenomen och gångarter som vi varken designade eller förväntade oss, och senare fick reda på att det också finns i biologiska insekter, " säger Minati. Sådana framväxande fenomen uppstår särskilt när nätverket realiseras med analoga komponenter och tillåter en viss grad av självorganisering, representerar ett tillvägagångssätt som skiljer sig mycket från konventionell teknik, där allt är designat a-priori och fixat. "Det här tar oss så mycket närmare hur biologi fungerar, " han lägger till.
Yasuharu Koike, också baserat på IIR, kommentarer:"En viktig aspekt av styrenheten är att den kondenserar så mycket komplexitet till endast ett litet antal parametrar. Dessa kan betraktas som högnivåparametrar, genom att de uttryckligen ställer in gång, fart, hållning, etc. Eftersom de kan ändras dynamiskt, i framtiden borde det vara lätt att variera dem i realtid med hjälp av ett hjärn-dator-gränssnitt, tillåter kontrollen av komplex kinematik som annars är omöjlig att dominera med nuvarande tillvägagångssätt."
Och Natsue Yoshimura, också baserat på IIR, säger:"När kontrollenheten reagerar gradvis och förkroppsligar ett biologiskt rimligt förhållningssätt till mönstergenerering, vi tror att det kan vara mer sömlöst att köra jämfört med system som avkodar diskreta kommandon. Detta kan få praktiska konsekvenser, och vårt labb har betydande kunskap inom detta område."