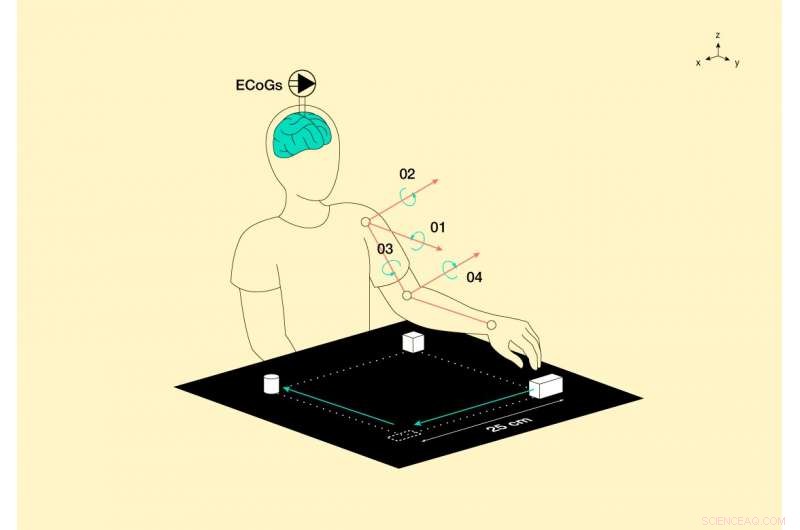
Handrörelseförutsägelser. Kredit:Lion_on_helium/MIPT
Forskare från Moskva institutet för fysik och teknik har utvecklat en modell för att förutsäga handrörelsebanor baserade på kortikal aktivitet:Signaler mäts direkt från en mänsklig hjärna. Förutsägelserna bygger på linjära modeller. Detta avlastar processorn, eftersom det kräver mindre minne och färre beräkningar i jämförelse med neurala nätverk. Som ett resultat, processorn kan kombineras med en sensor och implanteras i kraniet. Genom att förenkla modellen utan att försämra förutsägelserna, blir det möjligt att svara på de förändrade hjärnsignalerna. Denna teknik skulle kunna driva exoskelett som skulle tillåta patienter med nedsatt rörlighet att återfå rörelse. Tidningen publicerades i Expertsystem med applikationer , den ledande tidskriften inom området artificiell intelligens.
Skador på ryggmärgen förhindrar motoriska signaler som genereras av hjärnan från att nå musklerna. Som ett resultat, patienter kan inte längre röra sig fritt. För att återställa rörelse, hjärnbarkens signaler mäts, avkodad, och överförs till ett exoskelett. Avkodning innebär att tolka signalerna som en förutsägelse av den önskade lemrörelsen. För att fånga upp signaler av hög kvalitet, sensorn måste implanteras direkt i hjärnan.
Kirurgisk implantation av en sensor med elektroder på motorbarken, det område av hjärnan som ansvarar för frivilliga rörelser, har redan utförts. En sådan sensor drivs av ett kompakt batteri som laddas upp trådlöst. Enheten levereras med en processorenhet som hanterar de inkommande signalerna, och en radiosändare som vidarebefordrar data till en extern mottagare. Processorn värms upp under drift, vilket blir problematiskt, eftersom den är i kontakt med hjärnan. Detta sätter en begränsning på förbrukad ström, vilket är avgörande för att avkoda signalen.
Tillräckligt mäta hjärnsignaler är bara en del av utmaningen. För att använda dessa data för att kontrollera konstgjorda lemmar, rörelsebanor måste rekonstrueras från elektrokortikogrammet - en registrering av hjärnans elektriska aktivitet. Detta är poängen med signalavkodning. Forskargruppen ledd av professor Vadim Strijov från MIPT arbetar med modeller för att förutsäga handbanor baserade på elektrokortikogram. Sådana förutsägelser är nödvändiga för att möjliggöra exoskelett som patienter med nedsatt motorisk funktion skulle kunna kontrollera genom att föreställa sig naturliga rörelser hos sina lemmar.
"Vi vände oss till linjär algebra för att förutsäga lemrörelsebanor. Fördelen med de linjära modellerna framför neurala nätverk är att optimeringen av modellparametrar kräver mycket färre operationer. Det betyder att de är väl lämpade för en långsam processor och ett begränsat minne, " förklarar Strijov, tidningens seniorförfattare.
Hjärnan överhettas. Kredit:Lion_on_helium/MIPT
"Vi löste problemet med att bygga en modell som skulle vara enkel, robust, och exakt, " tillägger Strijov, som är chefsforskare vid MIPT:s Machine Intelligence Laboratory. "Enkelt, Jag menar att det finns relativt få parametrar. Robusthet avser förmågan att bibehålla rimlig prediktionskvalitet under mindre förändringar av parametrar. Precision innebär att förutsägelserna adekvat approximerar naturliga fysiska lemrörelser. För att uppnå detta, vi förutsäger rörelsebanor som en linjär kombination av elektrokortikogrammets funktionsbeskrivningar."
Varje elektrod matar ut sin egen signal representerad av en frekvens och en amplitud. Frekvenserna är uppdelade i band. Funktionsbeskrivningen är en historik över kortikogramsignalvärden för varje elektrod och varje frekvensband. Denna signalhistorik är en tidsserie, en vektor i linjärt rymd. Varje funktion är därför en vektor. Förutsägelsen av handrörelsebanan beräknas som en linjär kombination av funktionsvektorer, deras vägda summa. För att hitta de optimala vikterna för den linjära modellen – dvs. de som resulterar i en adekvat förutsägelse – ett system av linjära ekvationer måste lösas.
Dock, lösningen på systemet som nämns ovan är instabil. Detta är en följd av att sensorerna är placerade nära varandra så att närliggande sensorer matar ut liknande signaler. Som ett resultat, den minsta förändringen i de signaler som tas upp orsakar en avsevärd förändring i banprognosen. Därför, Problemet med att minska dimensionaliteten i särdragsutrymmet måste lösas.
Författarna till artikeln introducerar en metod för urval av funktioner baserad på två kriterier. Först, funktionsparen måste vara distinkta, och för det andra, deras kombinationer måste approximera målvektorn någorlunda väl. Detta tillvägagångssätt gör att den optimala funktionsuppsättningen kan erhållas även utan att modellparametrarna beräknas. Med hänsyn till sensorernas inbördes positioner, forskarna kom fram till en enkel, robust, och ganska exakt modell, vilket är jämförbart med dess analoger när det gäller prediktionskvalitet.
I deras framtida arbete, laget planerar att ta itu med problemet med lembanebeskrivning vid variabel hjärnstruktur.
Strijov förklarar:"Genom att flytta runt och få respons från omgivningen, människor lär sig. Hjärnans struktur förändras. Nya anslutningar, gör modellen föråldrad. Vi måste föreslå en modell som skulle anpassa sig till förändringarna i hjärnan genom att ändra sin egen struktur. Denna uppgift är långt ifrån enkel, men vi jobbar på det."