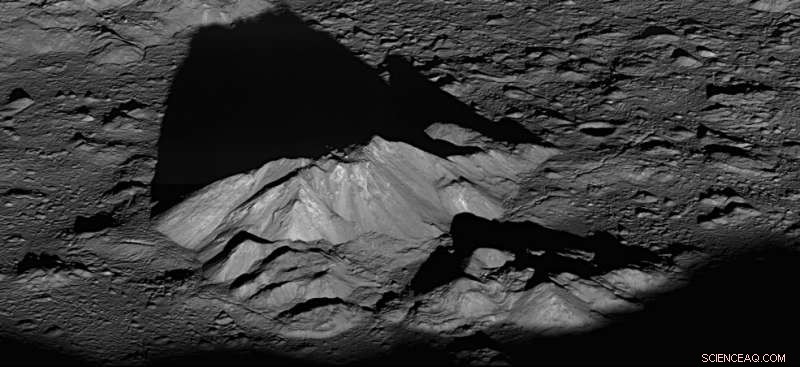
Ett exempel på LRO:s förmåga att se åt sidan, eller dödade, är denna bild av den centrala toppen i Tycho-kratern. Det centrala toppkomplexet är cirka 15 kilometer (cirka 9,3 miles) brett sydost till nordväst (vänster till höger i denna vy). Kredit:NASA/GSFC/Arizona State University
NASA:s Lunar Reconnaissance Orbiter (LRO) rymdfarkost har vida överskridit sin planerade uppdragslängd, avslöjar att månen rymmer överraskningar:isavlagringar som kan användas för att stödja framtida månutforskning, de kallaste platserna i solsystemet i permanent skuggade områden vid månens poler, och att det är en aktiv värld som krymper, genererar månbävningar och förändras framför våra ögon. LRO har kartlagt ytan i utsökt detalj, returnerar miljontals bilder av ett starkt vackert månlandskap och banar väg för framtida mänskliga uppdrag under NASA:s Artemis-program.
Under våren 2018 LRO:s Miniature Inertial Measurement Unit (MIMU), en kritisk sensor som används för att peka rymdfarkostens instrument, stängdes av för att bevara dess återstående liv efter att ha visat tecken på nedgång på grund av naturligt åldrande i rymdens hårda miljö. MIMU är som en hastighetsmätare. Den mäter LRO:s rotationshastighet. Utan det, LRO var tvungen att endast förlita sig på data från stjärnspårare - videokameror med bildbehandlingsprogram som härleder orientering baserad på stjärnkartor - för att peka och omorientera rymdfarkosten. "Detta begränsade möjligheten att omorientera (döda) rymdfarkosten för vetenskapliga ändamål, sa Julie Halverson, Ledande systemingenjör i rymdvetenskapsuppdrag vid NASA:s Goddard Space Flight Center i Greenbelt, Maryland.
"Att omorientera rymdfarkosten för att få sidovydata är värdefullt för forskare eftersom det låter oss mäta hur ljus reflekteras från månen på olika sätt, beroende på hur instrumentet ser ut, sa Noah Petro, Projektforskare för LRO vid NASA Goddard. "Detta kallas ytans fotometri. Dessutom, kameran tar sidobilder för att skapa 3D-bilder av ytan och för att samla in perspektivvyer av månen som hjälper till att lösa upp geologiska relationer." För att få LRO att svänga igen, NASA-ingenjörer utvecklade en ny algoritm som kan uppskatta LRO:s rotationshastighet genom att smälta samman stjärnspårningsmätningar med annan information tillgänglig från LRO:s flygdator.
För att LRO:s nya hastighetsmätare ska fungera korrekt, stjärnspårarna måste ha fri sikt över stjärnorna, som kan blockeras av jorden eller månen, eller solens bländning. Annat, det är omöjligt att bestämma orienteringen eller uppskatta rymdfarkostens rotationshastighet. Att säkerställa att stjärnspårarna alltid är fria under vetenskapsmanövrar gjorde många vetenskapliga observationer som lätt kunde göras med MIMU omöjliga att utföra utan den. För att återta dessa annars förlorade möjligheter, Goddard, NASA:s Engineering Safety Center (NESC) och Naval Postgraduate School (NPS) i Monterey, Kalifornien, slagit sig samman igen i sin långa historia av kooperativ forskning för att snabbt utveckla en samling nya, revolutionerande metoder för att göra det möjligt för LRO att fortsätta utforska månen till sin fulla förmåga.
"Algorithmen vi utvecklade för LRO kallas Fast Maneuvering eller 'FastMan' och den fungerar tillsammans med LRO:s stjärnspårningsbaserade kontroller, sa Mark Karpenko, en forskningsdocent vid NPS och FastMan Project Lead. "Manövrarna styr naturligt runt ljusa föremål precis som att undvika hinder i en självkörande bil." En datoralgoritm är en uppsättning instruktioner för att bearbeta data. Karpenko kunde konstruera FastMan genom att använda mjukvaruverktyg som är baserade på samma verktyg som tidigare använts av ett NASA-NPS-team för att omorientera den internationella rymdstationen genom att kombinera krafter från rymdmiljön tillsammans med dess gyroskop snarare än att bränna bränsle genom att avfyra dess thrusters . Denna "Zero Propellant Maneuver" liknar en slagmanöver som används vid segling.
"Lunar Reconnaissance Orbiter genomgår frekventa speciella svängningar när den kretsar runt månen och vår förmåga att schemalägga dessa svep är begränsad av den tid det tar att utföra dem, sa John Keller, Biträdande projektforskare för LRO vid NASA Goddard. Med FastMan, LRO kunde utföra nästan 200 ytterligare svängar som inte hade kunnat utföras annars.
"Faktiskt, De flesta av de prestandaförbättringar vi har uppnått hittills var genom att använda resultaten från FastMan för att skapa vad vi kallar en "taxibil"-manöver, " sa Karpenko. Eftersom hela FastMan krävde ändringar i LRO:s flygprogramvara, Karpenko designade taximanövern för att uppnå de flesta av FastMans mål utan att behöva modifiera flygprogramvaran. "Tyvärr, tills vi kunde uppdatera flygprogramvaran, Jag var tvungen att vara i slingan, " sa Karpenko. Hela FastMan-manövern är helt autonom.
Det första FastMan-slaget genomfördes i omloppsbana i slutet av juli 2020 och tillät LRO-kameran, ett av LRO:s sju vetenskapliga instrument, för att få en sidobild av Triesnecker-kratern 25 procent snabbare än en taxibilsförskjutning skulle ha tillåtit. Med dessa nya algoritmer, LRO kan återigen snabbt titta åt sidan, och rymdfarkosten är vid god hälsa, med alla instrument som fortfarande samlar in data. "LRO är nu i år 11 av vad som ursprungligen förväntades bli ett tvåårigt uppdrag, ", sa Petro. "Vi övervakar regelbundet alla LRO-system för tecken på försämring eller förändring. Bränsle kan vara vår hastighetsbegränsande faktor, nuvarande uppskattningar gör att vi har minst fem år till med bränsle ombord, om inte mer."
2010, NPS, NESC och Goddard samarbetade för att implementera de första minimitidsomorienteringsmanövrarna som någonsin utförts i omloppsbana. Detta innovativa arbete utfördes som en flygdemonstration på rymdfarkosten TRACE. I dag, månvetenskapsgemenskapen är förmånstagaren av detta banbrytande arbete. "De svängningsalgoritmer som utvecklats av NPS har redan gjort det möjligt för LRO att samla in mer vetenskap, " förklarade Neil Dennehy, NASA teknisk fellow för vägledning, Navigering och kontroll. "Jag förväntar mig att våra branschpartners i framtiden också kommer att kunna utnyttja denna teknik."