Typiska beteenden hos dropparna som manipuleras med hjälp av den magnetiskt aktiverade roboten. Upphovsman:Science Advances, doi:10.1126/sciadv.aay5808
Droppmanipulation inom materialvetenskap kan bidra till vatteninsamling, medicinsk diagnostik och läkemedelsleverans. Även om strukturbaserade flytande operationer används i stor utsträckning i naturen och i bioinspirerade konstgjorda material, laboratoriestrategier beror på fasta strukturer för enriktad vattenrörelse. I en ny studie om Vetenskapliga framsteg , En Li och ett forskargrupp vid Institute of Chemistry och University of Chinese Academy of Sciences i Kina föreslog att utveckla en magnetstyrd robot. Konstruktionen hade justerbara strukturer för att fördela motståndskrafter och bestämma droppbeteende. Roboten kunde transportera, dela, släpp och rotera droppar för universella tillämpningar inom olika områden och tuffa miljöer. De nya fynden erbjuder en effektiv strategi för automatiserad droppmanipulation.
I det här arbetet, Li et al. använt tillförlitliga metoder för att manipulera droppar med hjälp av en magnetstyrd robot med stålpärlor i ett programmerbart magnetfält. Forskarna kontrollerade robotens struktur genom att justera magnetfältet. De differentierade robotstrukturerna ledde till olika droppbeteendekombinationer inklusive split, släpp, rotation och transport. Roboten är universellt applicerbar på olika vätskor inklusive vatten, olja och gas. Li et al. hjälpt robotaktivering över begränsade utrymmen, på ojämna ytor och även under vattenfria eller anaeroba förhållanden. Arbetet har stor potential för materialtransport, mikrofabrikation och inom klinisk medicin.
Droppmanipulation i laboratoriet är inspirerad av naturen. Till exempel, växter och djur har uppvisat dimuppsamlingssystem i kaktusar, vattensamling på spindelsilke och påverkade Namib Desert beetles beteende för att samla upp och flytta vatten. Den asymmetriska och inneboende strukturen för vattenprovtagning kan framkalla en Laplace -tryckgradient i dropparna, orsakar rörelse i en förinställd riktning. Forskare kan använda olika externa strategier inklusive elektricitet, magneter, akustik och vätande ytor för att aktivera deras rörelse. Av dessa, magnetisk kraft har fördelen med långdistansåtgärd, säkerhet och enkel kontroll. Forskare hade använt magnetiska partiklar för att dra vattendroppar över hydrofoba eller mönstrade ytor och över magnetiskt mottagliga material.
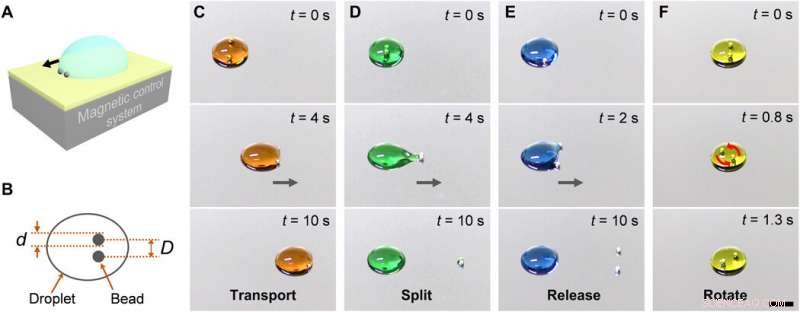
Schema och demonstration av den magnetstyrda roboten. (A) Schema för droppmanipuleringssystemet. (B) Parametrar som beskriver den magnetstyrda roboten. (C till F) Typiska beteenden hos dropparna som manipuleras av roboten. Droppar kan transporteras (C), split (D), släppt (E), och roteras (F) av roboten. De grå pilarna representerar robotarnas rörelseriktning. Rörelsehastigheten är 2 mm/s. Dropparnas volym är 250 | il. Skala, 5 mm. Upphovsman:Science Advances, doi:10.1126/sciadv.aay5808
Li et al. kallade de två stålpärlorna i magnetstyrsystemet "roboten" och färgade vattendropparna med livsmedelstillsatser för att tydligt identifiera olika sätt att aktivera. Den hydrofila (vattenälskande) roboten fångade lätt droppen vid kontakt. Forskargruppen överförde droppen och justerade dess struktur för att dela en dotterdroppe eller släppa droppen genom att minska eller öka avståndet mellan pärlorna. Processen förlitades främst på robotstrukturen där dess volym (V) påverkade resultatet. Li et al. kvantifierade strukturen hos roboten med hjälp av pärlornas centrum-till-centrum-avstånd till diametern (D/d). Till exempel, en robot med ett D/d -förhållande på 1,67 kan transportera en 150 µL vattendroppe. Dock, om droppen förstoras till 350 µL, det skulle dela sig. För att förstå detta, de analyserade mekaniskt hela systemet och bestämde sedan drivkraften bakom enheten som vidhäftning mellan pärlan och droppen.

Visning av de stegvisa syrabaserade neutraliseringsreaktionerna. Upphovsman:Science Advances, doi:10.1126/sciadv.aay5808
Efter att ha kontrollerat vattendroppen i luften, laget undersökte roboten under olika förhållanden inklusive olika atmosfärer. Till exempel, de drog en droppe för att flytta den upp eller ner genom att övervinna tyngdkraften och vidhäftningskrafterna mellan olika droppar och substratet. Sådana anordningar har tillämpningar i begränsade utrymmen, t.ex. lådor och rör som är viktiga för mikrofluidik och klinisk medicin. Förlustfri transport och exakt reagenskontroll är avgörande för kvantitativa kemiska mikroreaktioner som används allmänt inom analytisk kemi, diagnostik och bioteknik. Till exempel, Li et al. genomförde sekventiella syrabasneutraliseringsreaktioner via programmerbar droppmanipulation av roboten, att dela en dotterdroppe och överföra den till en neutral droppe. Robotarna gav en mångsidig väg för att automatiskt styra droppar för mikroreaktioner med exakta alikvoter av reagens som vanligtvis är giftiga, radioaktivt eller explosivt i naturen.
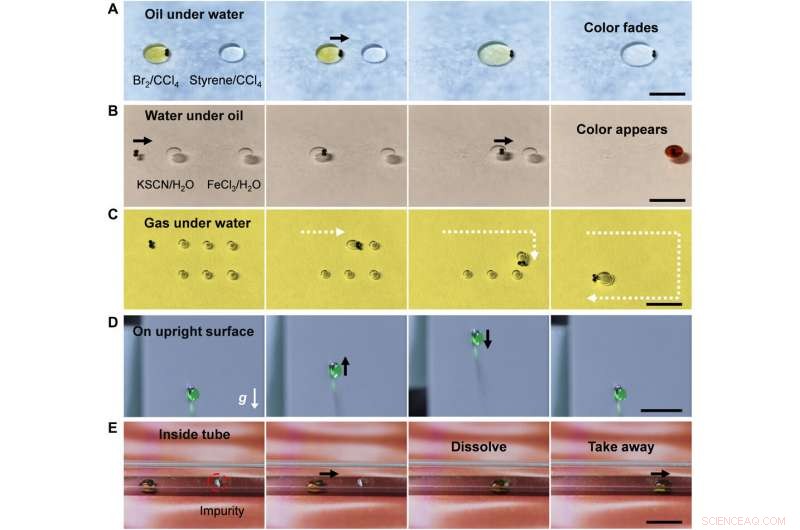
Allmänhet demonstration av roboten. (A) manipulering av oljedroppar under vatten. Oljedropparna (100 | il) löses CCl4 med Br2 (vänster) och styren (höger). Roboten transporterar den vänstra droppen för att blanda med den högra. (B) manipulering av vattendroppar under olja (n-heptadekan). Dropparna (50 | il) löses i vatten med KSCN (vänster) och FeCl3 (höger), respektive. Den vänstra droppen fångas upp av roboten och transporteras till den högra. (C) Gasbubbla manipulation under vatten. En superhydrofob robot kan successivt samla gasbubblorna (20 | il). Den vita prickade linjen indikerar robotens bana. (D) Manipulering av en vattendroppe på den upprättstående ytan. Roboten transporterar en 20 μl vattendroppe för att röra sig upp och ner med en hastighet av 2 mm/s. (E) Manipulering av en vattendroppe inuti ett rör. En droppe (20 μl) aktiveras av roboten för att fånga orenheten inuti ett rör. Efter 1 min, orenheten löses upp och tas bort av droppen. Den röda streckade cirkeln indikerar orenhetens plats. Den svarta pilen indikerar droppens rörelse. Skalstänger, 10 mm. Upphovsman:Science Advances, doi:10.1126/sciadv.aay5808
Forskarna simulerade sedan biomedicinska processer i labbet för att utforska robotens potential under in vivo medicinska applikationer. De simulerade först kalkyler eller mineralfyndigheter som finns i organ som njurar och gallblåsor, som i allmänhet förblir intakta på grund av strukturella gränser som förhindrar deras kirurgiska avlägsnande. Med microrobot, de drog en läkemedelsdroppe till de simulerade kalkylerna till kalkylerna för enkel insamling och borttagning (baserat på kompatibiliteten mellan de två ytorna). I nästa experiment, de visade robotens potential att ta bort eller rensa blodkärl genom att bygga upp ett överflöd av kolesterol i kranskärlen - representerat med ett rör fyllt med vatten. De transporterade läkemedelsdropparna för att fånga den simulerade placken och löste upp läkemedlet för bortskaffande av roboten. De innovativa metoderna kan ha mångsidiga funktioner för in vivo medicinska applikationer.
Simulering av läkemedelsleverans. Upphovsman:Science Advances, doi:10.1126/sciadv.aay5808
På det här sättet, En Li och kollegor föreslog en enkel och allmän strategi för att manipulera droppar med hjälp av en magnetstyrd robot gjord av två stålpärlor. De kontrollerade strukturen med hjälp av ett magnetfält som reglerade fördelningen av resistiva krafter vid droppens främre och bakre segment. De insåg flera beteenden för dropparna inklusive transport, dela, frigöring och rotation. Förutom att manipulera vattendroppar i luften, roboten visade löfte att transportera komplexa vätskor som olja, vatten-i-olja och gas-i-vatten. Stålpärlorna visade manövrerbarheten hos dropparna i begränsade utrymmen, inklusive giftiga och radioaktiva miljöer. Arbetet har stor potential inom tillverkning av apparater, avkänning och bioanalys, liksom i medicin in vivo. Teamet föreställer sig ytterligare optimeringar av systemet kommer att möjliggöra mindre droppmanipulation i nano- och pico-liters skala med förbättrad biokompatibilitet.
© 2020 Science X Network