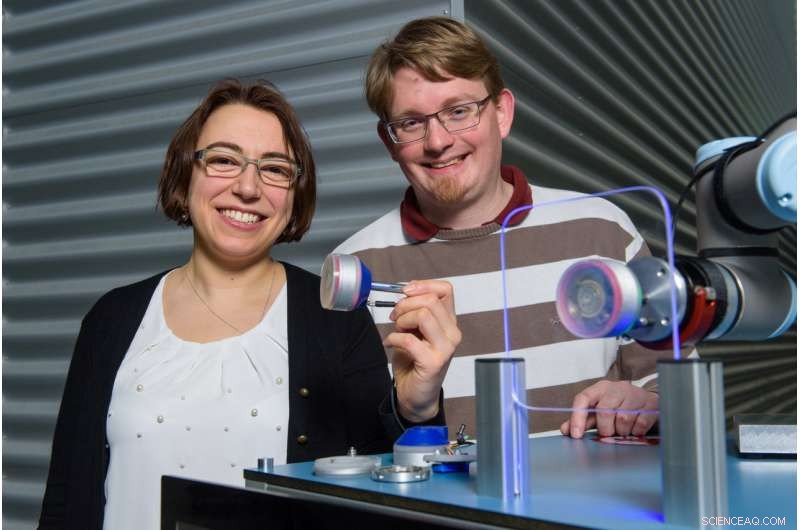
Susanne-Marie Kirsch och hennes forskarkollega Felix Welsch (r.) är forskningsassistenter inom gruppen som leds av Stefan Seelecke och utvecklar och optimerar vakuumgripartekniken. Upphovsman:Oliver Dietze
En kort elektrisk puls är allt som krävs för att generera och släppa ett kraftfullt vakuum på ett ögonblick. Den nya vakuumgriparen som utvecklats av forskargruppen ledd av professor Stefan Seelecke vid Saarlands universitet gör det möjligt för robotarmar att plocka upp föremål och flytta dem fritt i rymden. Systemet fungerar utan behov av tryckluft för att generera vakuumet, det är energieffektivt, tyst och lämplig för användning i rena rum. Specialisterna för intelligenta materialsystem använder sig av konstgjorda muskler, som är buntar av ultrafina formminnetrådar som kan spänna och slappna av precis som riktiga muskelfibrer gör. Ledningarna fungerar också som sensorer och kan känna av, till exempel, när griparen behöver justera eller dra åt greppet.
Vakuumgripare används ofta i industriella produktionslinjer, där de används för att sortera, transportera och hålla jämna och relativt plana föremål så att skruvar kan skruvas in, ytor målade eller komponenter monterade. Att använda vakuumgripare är vanligtvis en bullrig affär. De vanligaste systemen använder tryckluft, som inte bara gör dem högljudda, men betyder också att de behöver tung extrautrustning, vilket driver upp kostnaderna och gör hela systemet något oflexibelt. De förbrukar också betydande mängder energi.
Situationen är en helt annan när det gäller den nya vakuumtekniken som har utvecklats av professor Stefan Seelecke vid Saarlands universitet och Centrum för mekatronik och automationsteknik i Saarbrücken (ZeMA). Vakuumgriparen med formminne kan producera ett kraftfullt vakuum genom att bara använda en robotarm för att styra den på plats. Det kräver inget extra elektriskt eller pneumatiskt drivsystem, det är ljust, anpassbar, kostnadseffektiv att producera, och ljudlös. Det kräver bara små pulser av elektrisk ström, en puls för att generera vakuumet och en för att frigöra det. Ingen extra elektrisk kraft krävs när griparen håller ett föremål, även om föremålet måste hållas länge eller om det måste hållas i vinkel.
Tekniken är baserad på formminnesegenskaperna hos nickel-titaniumlegering. "Formminne hänvisar till det faktum att ett material kan ändra sin form och återgå till sin ursprungliga form efter att det har deformerats. Om elektrisk ström flyter genom en tråd gjord av denna legering, tråden blir varmare och dess gallerstruktur förvandlas på ett sådant sätt att tråden förkortas i längd. Om strömmen upphör, tråden svalnar och förlängs igen, säger Stefan Seelecke, förklara de viktigaste underliggande materialfasövergångarna. De ultrafina trådarna drar sig därför ihop och slappnar av som muskelfibrer, beroende på om en elektrisk ström flyter eller inte. "Dessa formminnetrådar har den högsta energitätheten av alla kända drivmekanismer, som gör det möjligt för dem att utföra kraftfulla rörelser i begränsade utrymmen, " förklarar Seelecke.
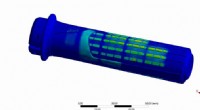
För att konstruera en vakuumgripare, forskarna arrangerade buntar av dessa fibrer på ett sätt som är analogt med en cirkulär muskel runt en tunn metallskiva som kan fällas upp eller ner, som en grodaklickerleksak. Att applicera en elektrisk puls gör att ledningarna drar ihop sig och skivan vänds. Skivan är fäst på ett gummimembran på en plan slät yta. När skivan vänds, det drar i membranet, skapa en stark, stabilt vakuum. Genom att bunta ihop ledningarna, den resulterande rörelsen är kraftfull och snabb.
"Flera ultratunna trådar ger en stor yta genom vilken de kan överföra värme, vilket innebär att de kan svalna mycket snabbt. Som ett resultat, bunten av fibrer kan förkortas och förlängas snabbt, gör det möjligt för griparen att gripa eller släppa ett föremål mycket snabbt, " förklarar forskningsassistent Susanne-Marie Kirsch. Kirsch och hennes kollega Felix Welsch utvecklar och optimerar vakuumgriparteknologin som en del av sina doktorandstudier. "För närvarande, griparen kan säkert hålla föremål som väger flera kilogram. Griparens lyftkapacitet är skalbar, med motsvarande fler trådar som används i stora gripdon, " förklarar Felix Welsch.
Och eftersom materialet som ledningarna är gjorda av har sensoriska egenskaper, vakuumgriparen är själv medveten om föremålet inte hålls säkert. "Trådarna ger all nödvändig information. Den elektriska resistansdata korrelerar exakt med omfattningen av deformation av ledningarna. Genom att tolka mätdata, styrenheten känner därför till den exakta positionen för ledningarna när som helst, " säger professor Seelecke. Griparen har alltså ett autonomt sätt att avgöra om dess vakuum är tillräckligt stabilt för den aktuella uppgiften eller inte. Den kan också ge varningar vid fel eller materialutmattning.