En liten obemannad Clearpath Husky-robot, som användes av ARL-forskare för att utveckla en ny teknik för att snabbt lära robotar nya traversala beteenden med minimal mänsklig tillsyn. Kredit:US Army
Forskare vid U.S. Army Research Laboratory och Robotics Institute vid Carnegie Mellon University utvecklade en ny teknik för att snabbt lära robotar nya traversala beteenden med minimal mänsklig tillsyn.
Tekniken tillåter mobila robotplattformar att navigera autonomt i miljöer samtidigt som de utför åtgärder som en människa förväntar sig av roboten i en given situation.
Experimenten i studien publicerades nyligen och presenterades vid Institute of Electrical and Electronics Engineers International Conference on Robotics and Automation som hölls i Brisbane, Australien.
ARL-forskare Drs. Maggie Wigness och John Rogers engagerade sig i diskussioner ansikte mot ansikte med hundratals konferensdeltagare under deras två och en halv timmes interaktiva presentation.
Enligt Wigness, ett av forskargruppens mål inom forskning om autonoma system är att tillhandahålla pålitliga autonoma robotlagkamrater till soldaten.
"Om en robot fungerar som en lagkamrat, uppgifter kan utföras snabbare och mer situationsmedvetenhet kan uppnås, " sade Wigness. "Vidare, robotlagkamrater kan användas som en första utredare för potentiellt farliga scenarier, och därmed hålla soldater längre från skada."
För att uppnå detta, Wigness sa att roboten måste kunna använda sin inlärda intelligens för att uppfatta, resonera och fatta beslut.
"Denna forskning fokuserar på hur robotintelligens kan läras från några mänskliga exempeldemonstrationer, "Wigness sa. "Lärningsprocessen är snabb och kräver minimal mänsklig demonstration, vilket gör det till en idealisk inlärningsteknik för inlärning på fältet när uppdragskraven förändras."
ARL- och CMU-forskare fokuserade sin första undersökning på att lära sig robottraversalbeteenden med avseende på robotens visuella uppfattning av terräng och objekt i miljön.
Mer specifikt, roboten lärde sig att navigera från olika punkter i miljön medan den vistades nära kanten av en väg, och även hur man korsar hemligt med byggnader som täckning.
Enligt forskarna, fått olika uppdragsuppgifter, det mest lämpliga inlärda traverseringsbeteendet kan aktiveras under robotdrift.
Detta görs genom att utnyttja omvänd optimal kontroll, även ofta kallad invers förstärkningsinlärning, som är en klass av maskininlärning som försöker återställa en belöningsfunktion givet en känd optimal policy.
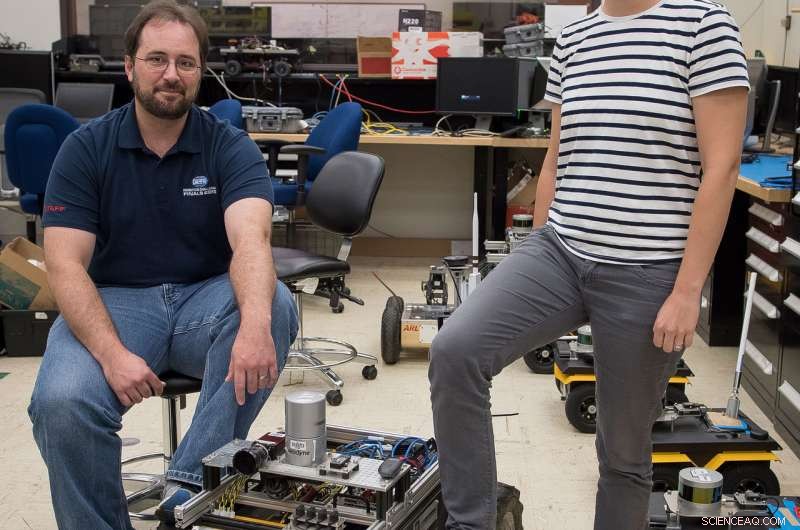
ARL-forskare Drs. Maggie Wigness och John Rogers poserar med en liten obemannad Clearpath Husky-robot i deras labb på Adelphi Laboratory Center i Maryland. Kredit:US Army
I detta fall, en människa visar den optimala policyn genom att köra en robot längs en bana som bäst representerar det beteende som ska läras in.
Dessa bana exemplar är sedan relaterade till de visuella terräng-/objektegenskaperna, som gräs, vägar och byggnader, att lära sig en belöningsfunktion med avseende på dessa miljöegenskaper.
Även om liknande forskning finns inom robotteknik, vad ARL gör är särskilt unikt.
"Utmaningarna och driftsscenarierna som vi fokuserar på här på ARL är extremt unika jämfört med annan forskning som utförs, ", sa Wigness. "Vi försöker skapa intelligenta robotsystem som fungerar tillförlitligt i krigsmiljöer, vilket betyder att scenen är mycket ostrukturerad, möjligen bullriga, och vi måste göra detta med tanke på relativt lite a priori-kunskap om miljöns nuvarande tillstånd. Det faktum att vår problemformulering är så annorlunda än så många andra forskare gör att ARL kan göra en enorm inverkan på forskningen om autonoma system. Våra tekniker, genom själva definitionen av problemet, måste vara robust mot brus och ha förmågan att lära sig med relativt små mängder data."
Enligt Wigness, denna preliminära forskning har hjälpt forskarna att visa möjligheten att snabbt lära sig en kodning av genomgående beteenden.
"När vi driver denna forskning till nästa nivå, vi kommer att börja fokusera på mer komplexa beteenden, som kan kräva att man lär sig från mer än bara visuella perceptionsfunktioner, "Wigness sa. "Vårt lärande ramverk är tillräckligt flexibelt för att använda a priori information som kan vara tillgänglig om en miljö. Detta kan inkludera information om områden som sannolikt är synliga för motståndare eller områden som är kända för att ha tillförlitlig kommunikation. Denna ytterligare information kan vara relevant för vissa uppdragsscenarier, och att lära sig med avseende på dessa funktioner skulle förbättra intelligensen hos den mobila roboten."
Forskarna undersöker också hur denna typ av beteendeinlärning överförs mellan olika mobila plattformar.
Deras utvärdering har hittills utförts med en liten obemannad Clearpath Husky-robot, which has a visual field of view that is relatively low to the ground.
"Transferring this technology to larger platforms will introduce new perception viewpoints and different platform maneuvering capabilities, " Wigness said. "Learning to encode behaviors that can be easily transferred between different platforms would be extremely valuable given a team of heterogeneous robots. In this case, the behavior can be learned on one platform instead of each platform individually."
This research is funded through the Army's Robotics Collaborative Technology Alliance, or RCTA, which brings together government, industrial and academic institutions to address research and development required to enable the deployment of future military unmanned ground vehicle systems ranging in size from man-portables to ground combat vehicles.
"ARL is positioned to actively collaborate with other members of the RCTA, leveraging the efforts of top researchers in academia to work on Army problems, " Rogers said. "This particular research effort was the synthesis of several components of the RCTA with our internal research; it would not have been possible if we didn't work together so closely."
I sista hand, this research is crucial for the future battlefield, where Soldiers will be able to rely on robots with more confidence to assist them in executing missions.
"The capability for the Next Generation Combat Vehicle to autonomously maneuver at optempo in the battlefield of the future will enable powerful new tactics while removing risk to the Soldier, " Rogers said. "If the NGCV encounters unforeseen conditions which require teleoperation, our approach could be used to learn to autonomously handle these types of conditions in the future."