Beröringskänslan mäts i allmänhet av en sensor som kan översätta ett tryck på den till en liten elektrisk signal. Kredit:Shutterstock
Vi har robotar som kan gå, ser, prata och hör, och manipulera föremål i sina robothänder. Det finns till och med en robot som kan lukta.
Men hur är det med känslan? Detta är lättare sagt än gjort och det finns begränsningar för några av de nuvarande metoderna som man tittar på, men vi utvecklar en ny teknik som kan övervinna några av dessa problem.
För människor, beröring spelar en viktig roll när vi rör på våra kroppar. Rör, kombinerat med syn, är avgörande för uppgifter som att plocka upp föremål - hårda eller mjuka, lätt eller tung, varmt eller kallt – utan att skada dem.
Inom området robotmanipulation, där en robothand eller gripare måste plocka upp ett föremål, att lägga till känslan kan ta bort osäkerheter i hanteringen av mjuka, ömtåliga och deformerbara föremål.
Jakten på smart hud
Att kvantifiera beröring i tekniska termer kräver inte bara exakt kunskap om mängden extern kraft som appliceras på en beröringssensor, men du behöver också veta kraftens exakta position, dess vinkel, och hur det kommer att interagera med objektet som manipuleras.
Sedan är det frågan om hur många av dessa sensorer en robot skulle behöva. Att utveckla ett robotskin som kan innehålla hundratals eller till och med tusentals beröringssensorer är en utmanande ingenjörsuppgift.
Att förstå de fysiska mekanismerna för beröringsavkänning i den biologiska världen ger stora insikter när det gäller att designa robotmotsvarigheten, en smart hud.
Men en betydande barriär för utvecklingen av smart hud är elektroniken som krävs.
Daglig kraft- och beröringsmätning
Känslan mäts i allmänhet av en sensor som kan omvandla tryck till en liten elektrisk signal. När du använder en digital våg för att väga dig själv eller mäta ingredienser i ditt kök, vågen använder förmodligen en piezoelektrisk givare.
Detta är en enhet som förvandlar en kraft till elektricitet. Den lilla elektriska strömmen från givaren leds sedan genom ledningar till ett litet mikrochip som läser av strömstyrkan, omvandlar det till en meningsfull viktmätning, och visar det på en skärm.
Trots att kunna känna olika nivåer av kraft, dessa elektroniska enheter har flera begränsningar som gör dem opraktiska för smart hud. Särskilt, de har en relativt långsam reaktionstid på kraften.
Det finns andra typer av beröringssensorer baserade på att ett material ändrar sina andra elektriska egenskaper, såsom kapacitans eller motstånd. Din mobiltelefonskärm kan ha denna teknik inbyggd, och om du använder en styrplatta på din dator kommer den säkert att använda beröringssensorer.
Mjuk och flexibel kraftavkänning
Det har gjorts stora framsteg de senaste åren med att göra touchsensorer som kan bäddas in i mjuka och flexibla material. Detta är precis vad vi behöver för smart hud.
Men många av dessa utvecklingar misslyckas helt (på grund av avkänningstypen) i närvaro av fukt. (Har du någonsin provat ett vått finger på din smarttelefons pekskärm?)
Medicinska tillämpningar är nu en viktig drivkraft bakom kravet på flexibel och robust kraftavkänning. Till exempel, smart hud kan användas för att återställa sensorisk feedback till patienter med hudskador eller perifer neuropati (domningar eller stickningar). Det kan också användas för att ge protetiska händer grundläggande beröringsförmåga.
Nyligen, forskare från MIT och Harvard har utvecklat en skalbar taktil handske och kombinerat den med artificiell intelligens. Sensorer som är jämnt fördelade över handen kan användas för att identifiera enskilda objekt, uppskatta deras vikt, och utforska de typiska taktila mönstren som uppstår när du tar tag i dem.
Forskarna skapade en handske med 548 sensorer monterade på ett stickat tyg som innehåller en piezoresistiv film (som också reagerar på tryck eller belastning) ansluten med ett nätverk av ledande trådelektroder.
Detta är det första lyckade försöket att spela in sådana signaler i stor skala, avslöjar viktiga insikter som kan användas i framtida design av proteser och robotgreppverktyg.
Men precis som nästan alla andra touch-gränssnitt som är designade med kapacitiv, resistiva eller piezoelektriska tekniker, denna taktila teknik fungerar inte bra med våta fingrar eller under vattnet.
Optisk kraftavkänning vid horisonten
För att lösa detta problem, Vi har utvecklat en ny form av taktil sensor som använder nanometer-tunna filmer av organiska lysdioder (OLED) och organiska fotodioder (OPD) för mätning av mjuk beröring.
OLED -teknik finns normalt i tv- och smartphone -skärmar. Vår metod för att mäta känseln är baserad på optisk kraftavkänning.
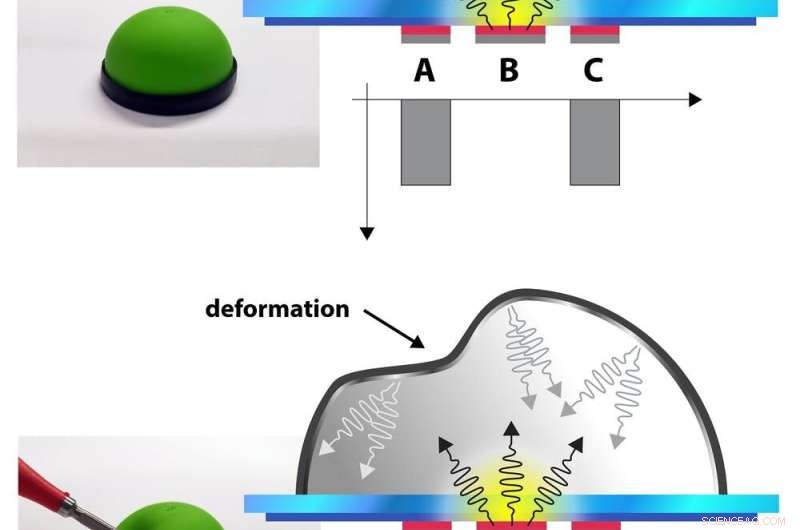
Ett enda beröringselement som består av en kupol över några OLED -pixlar. Topp, när ingenting rör kupolen reflekteras lika mycket ljus från den ljusemitterande pixel B, till ljusdetekterande pixlar A och C. Botten, när något rör kupolen, den deformeras och mängden reflekterat ljus ändras mellan pixlar A och C. Kredit:Ajay Pandey, Författare tillhandahålls
The OLED elements (called diodes or pixels) are actually fully reversible. This means that as well as being able to produce light (like in a TV screen), these pixels can also detect light.
Using this principle we can manufacture a tiny, opaque, flexible dome with a reflective coating that is placed above some OLED pixels. Light emitted from the central pixel is uniformly distributed across all other pixels under the dome if the dome is not disturbed.
But if the dome is pressed—by touching something—it will deform, resulting in an unequal response from the pixels being used to detect the reflected light. Combining the responses from dozens of these domes in the area of contact it will be possible to estimate the force being applied.
This approach is a significant step towards simplifying the smart skin layout for large area applications and we hope that we will soon see robots that can have full body sensing in the air, when wet or even underwater.
Den här artikeln är återpublicerad från The Conversation under en Creative Commons-licens. Läs originalartikeln.