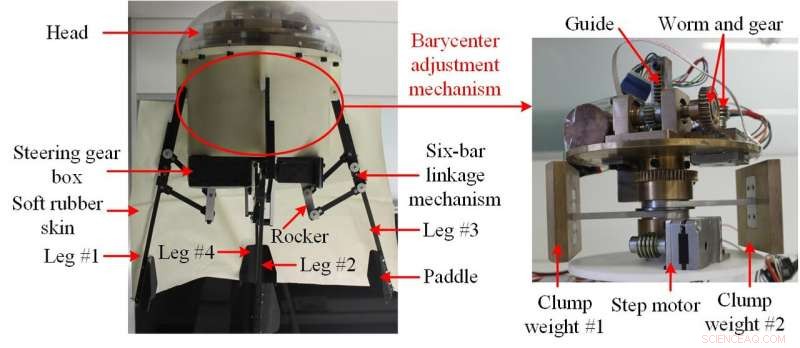
Den mekaniska designen av robotmaneten. Upphovsman:© Science China Press
Som en inspirationskälla, vattenlevande varelser som fisk, valar, och maneter kan inspirera till innovativ design för att förbättra sätten som konstgjorda system fungerar i och interagerar med vattenmiljöer. Maneter i naturen driver sig genom sin omgivning genom att radiellt expandera och dra ihop sina klockformade kroppar för att trycka vatten bakom sig, som kallas jetdrivning.
I motsats till den rådande uppfattningen att maneter beskrivs som ineffektiva simmare, Maneter har visat sig vara en av de mest energiskt effektiva simmare. Det är, det har visat sig att manetliknande simning kommer att ha en anmärkningsvärd framdrivningsfördel om lågenergidrift efterfrågas. Därför, maneternas rörelser har väckt stort intresse under det senaste decenniet i samband med bioinspirerade undervattensfordon.
Nyligen, forskare från Institute of Automation, Chinese Academy of Sciences i Peking, Kina har framgångsrikt utvecklat en ny robotmanet som kan utföra tredimensionell manetliknande framdrivning och manövrar baserat på en förstärkningsinlärningsbaserad metod.
Genom att kombinera de senaste framstegen inom mekatronisk design, material, elektronik, och kontrollmetoder, forskare gör ett integrerat försök att utveckla smarta ställdon för att tillverka olika robotmaneter. I allmänhet, sådana robotmaneter är ofta bundna och mycket långsammare i hastighet jämfört med den typ som manövreras av konventionella elmotorer. De flesta befintliga robotmaneter kan inte fritt justera sin treaxliga attityd, som har en negativ inverkan på frisimmande framdrivning och troliga tillämpningar.
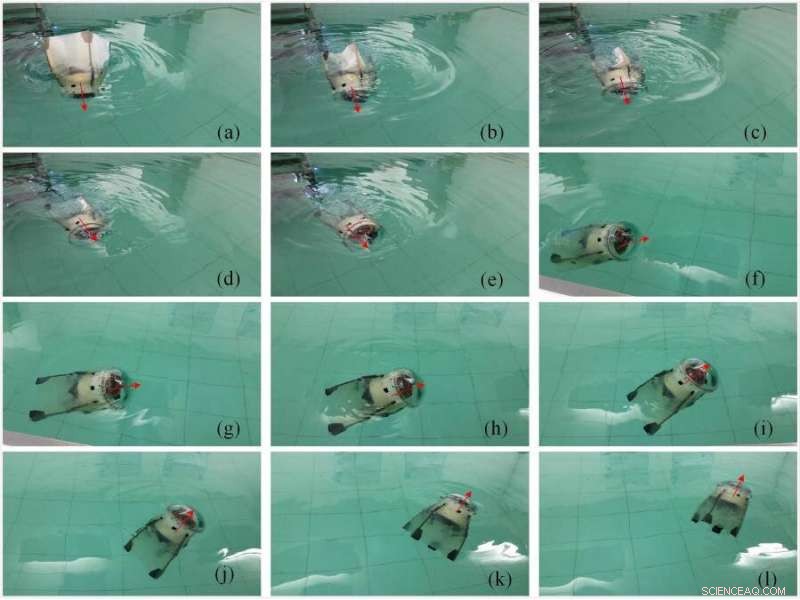
Ögonblicksbilder av robotmaneter som utför en hybridrörelse som sammanflätar vertikal och horisontell simning. Upphovsman:© Science China Press
För att lösa det här problemet, forskargruppen som leds av prof. Junzhi Yu från Institute of Automation, Kinesiska vetenskapsakademien, har undersökt hur ett bioinspirerat motordrivet manetliknande robotsystem med förmåga till 3D-rörelse utformas och styrs.
De designade robotmaneterna är modellerade efter Aurelia aurita (vanligen kallad månmaneter), som har en relativt stor slagvolym och är särskilt lämpad för användning med stor lastkapacitet. Den är ca 138 mm hög och väger ca 8,2 kg. Som illustreras i figur 1, robotmaneten är halvklotformad och består av ett klockformat styvt huvud, en cylindroid huvudhålighet, fyra separata kopplingsmekanismer med sex barer, och en mjuk gummihud. För att förbättra robotmaneternas manövrerbarhet, en barycenterjusteringsmekanism monterad inuti kaviteten införs. Genom att justera två klumpvikter i vertikal eller horisontell riktning eller i en kombination av de två, attitydereglering uppnås.
"Det är mycket svårt att etablera en exakt dynamisk modell för maneterliknande simning, eftersom det är mycket olinjärt, stark koppling, och tidsvarierande system, "sa prof. Junzhi Yu." Parametriska osäkerheter och yttre störningar i dynamiska vattenmiljöer, på samma gång, orsaka svårigheter att härleda kontrolllagar genom att lösa problemet med invers kinematik. "Därför, en förstärkningsinlärningsbaserad metod för attitydkontroll med sluten slinga föreslås för robotmaneter, som kan lösa optimala beslutskontrollproblem genom direkt interaktion med omgivningen, särskilt utan behov av dynamisk modellering.
Till sist, förslaget om förstärkningsinlärningsbaserad attitydkontrollmetod gör autonom attitydereglering möjlig. "I jämförelse med de flesta andra robotmaneter, den byggda roboten uppvisar en hög strukturflexibilitet och girbarhet, " Påpekar Yu. Han betonade också att denna självgående robotmanet med 3D-rörelse har stora konsekvenser för bioinspirerad design av jetframdrivningssystem med stor smidighet.