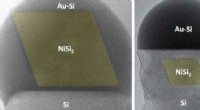
En demonstration av systemets avstånds -approximation. Upphovsman:Bansal et al.
Många länder världen över står för närvarande inför stora problem i samband med insamling av avfall, särskilt i stadsområden, på grund av den stora mängden avfall som dagligen genereras av befolkningen. Teknik kan spela en viktig roll för att hantera dessa frågor, till exempel, genom utveckling av effektivare verktyg för att samla och samla skräp.
Med detta i åtanke, forskare vid Vishwakarma Government Engineering College i Indien har nyligen skapat ett billigt och effektivt system för automatisk sophämtning och insamling. Deras system, presenterad i ett papper som för publicerats på arXiv, använder algoritmer för artificiell intelligens (AI) för att upptäcka och lokalisera avfall i sin omgivning, tar sedan upp den med en robotgripare.
"Samtidiga metoder har svårt att hantera volymen fast avfall som genereras av den växande stadsbefolkningen, "forskarna skrev i sin artikel." Vi föreslår ett system som är mycket hygieniskt och billigt som använder AI -algoritmer för att upptäcka skräpet. "
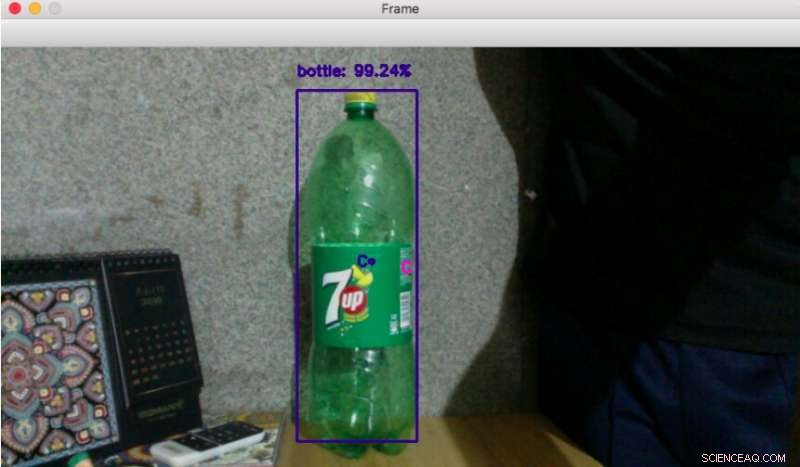
Avfallshanteringssystemet, som forskarna kallar AGDC (automatisk sopdetektering och insamling), består av en robotkropp (dvs. en bas, en robotarm och en låda) och flera maskininlärningsalgoritmer. Systemet använder konvolutionella neurala nätverk (CNN) för att upptäcka skräp på marken och i dess närhet. När det väl upptäcker ett skräp, den beräknar sin position genom att analysera bilder som samlats in med en integrerad kamera.
"Objektdetektering avser att identifiera förekomster av objekt av en viss klass (som flaskor, katt, hund eller lastbil) i bilder och videor i digitalt format, "förklarade forskarna." AGDC använder objektdetektering för att klassificera skräpet med resten av föremålen i bilden/videon. Objektdetekteringsalgoritmen gör det möjligt för AGDC att identifiera platser i bilden eller videon där objektet av intresse (dvs sopor) vilar. "
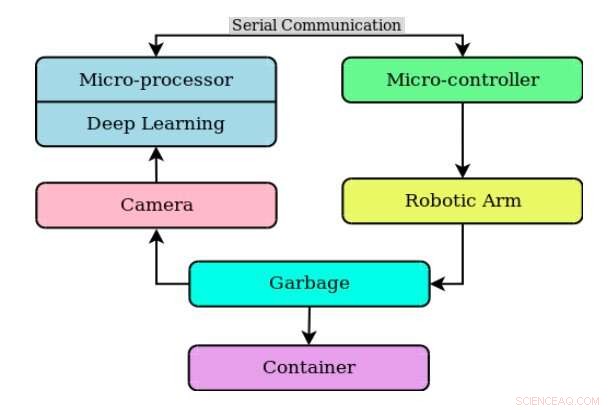
Seriellt kommunikationsflöde. Upphovsman:Bansal et al.
När systemets CNN upptäcker ett skräp i dess närhet, en annan algoritm uppskattar avståndet mellan roboten och skräpet, samtidigt som den genererar instruktioner för roboten att nå målplatsen. Skräpens position och dessa instruktioner matas sedan till en mikrokontroller, som i huvudsak styr robotens rörelser.
"Efter att ha slutfört uppgiften att identifiera objekt, nästa uppgift är att identifiera objektets avstånd från basen av robotarmen, vilket är nödvändigt för att låta robotarmen hämta skräpet, "förklarade forskarna.
När mikrokontrollern får information om var en sopor finns, den flyttar roboten mot den platsen. När roboten äntligen når skräpet som upptäckts av CNN:erna, den använder en robotarm för att samla den och tappar den i en behållare (dvs. låda) som är fäst vid dess kropp.
"Sopsamlarens design kan delas upp i tre huvuddelar:bas, robotarm och låda, "skrev forskarna." Basen driver roboten mot soporna, robotarmen samlar skräpet och lådan lagrar skräpet som samlats upp av robotarmen. "
Forskarna har redan utvecklat en prototyp av sitt avfallsdetekteringssystem, som för närvarande kan samla upp till 100-200g skräp. I deras framtida arbete, de planerar att expandera på denna prototyp, så att den kan samla två till tre kilo skräp innan den tömmer sin låda.
Dessutom, laget funderar på att utveckla och utbilda en ny CNN -modell som skulle göra det möjligt för AGDC att upptäcka flera sopor samtidigt. Så småningom, att ansluta roboten till internet kan också möjliggöra bredare implementeringar, till exempel, skapa ett automatiserat nätverk av system som samarbetar för att effektivt samla avfall inom specifika områden.
© 2019 Science X Network