ShapeBots exemplifierar en ny typ av formförändrande gränssnitt som består av en svärm av självtransformerbara robotar. A) Två ShapeBot -element. B) En miniatyrrullebaserad linjär ställdon för självtransformation. Genom att utnyttja individuell och kollektiv transformation, ShapeBots kan tillhandahålla C) interaktiv fysisk display (t.ex. att göra en rektangel), D) objektaktivering (t.ex. städning av ett skrivbord), E) Distribuerad formvisning (t.ex. gör en dynamisk yta), och F) inbäddad datafysikalisering (t.ex. visar populationer av stater på en amerikansk karta). Upphovsman:Suzuki et al.
Forskare från University of Colorado Boulders ATLAS Institute har nyligen utvecklat en svärm av små formförändrande robotar, kallas ShapeBots. Dessa självtransformerbara robotar, presenterad i ett papper som för publicerats på arXiv, kan ändra både sin individuella och kollektiva konfiguration, för att visa och visualisera information i en mängd olika inställningar.
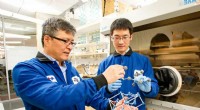
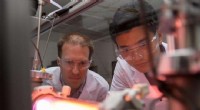
Robotarna utvecklades av Ph.D. studenterna Ryo Suzuki och Clement Zheng, med hjälp och handledning av flera andra forskare vid University of Colorado Boulder. Deras arbete inspirerades av några av Suzukis tidigare forskningsinsatser, till exempel projektet Reactile, där han programmerade små robotbeteenden genom direkt handmanipulation.
Suzuki fascinerades alltid av dynamiska människa-dator-interaktioner och han har ofta försökt utveckla robotar som kan kommunicera med användare på unika och innovativa sätt. Än så länge, huvudmålet bakom de flesta av hans studier har varit att komma med nya beräkningsmedier som kan öka och förändra hur människor tänker, design, program, och interagera med sin omgivande miljö.
"Mänskliga miljöer kan vara i olika skalor, "Ellen Do och Mark D. Gross, två andra forskare som genomförde studien, berättade för TechXplore via e -post. "Till exempel, en skrivbordsmiljö kan innehålla objekt på bordet, eller utskott på bordsytan. En kontorsmiljö kan innehålla möbler som bord, stolar, men också bokhyllorna och skåpen, eller klockor, affischer och whiteboards på väggen. Alla dessa objekt kan också flyttas eller transformeras med robotar. "
Under deras senaste samarbete, Do, Äckligt, Suzuki, Zheng och resten av deras team gav sig ut för att undersöka vad ShapeBots, en svärm av formbytande robotar på bordsskivor, kanske kan göra och hur de kan interagera med människor. Suzuki och Zheng fokuserade på att bygga robotarna och programmera deras beteende.
"Tanken bakom vår studie är enkel, tänk om alla våra miljöer består av formförändrande små robotar? "Do och Gross förklarade." Vilka kan vara användbara scenarier där dessa små robotar kan hjälpa till att göra våra liv intressanta eller enklare? Några exempel på dessa scenarier kan vara rengöring av bordsskivan, skydda oss från att hämta en kaffemugg som är för varm, visa befolkningsinformation baserat på geografiska platser på en karta, fungerar som interaktiv grafik, etc."
Varje enskild ShapeBot levereras med små motorer som gör att den kan köra runt på en plan yta, samt ytterligare motorer som används för att förlänga och dra in armarna. Robotarna kommunicerar med en värddator som spårar sina positioner med hjälp av en kamera, som kontinuerligt observerar svärmen. Värddatorn koreograferar robotarnas rörelser på en platt bordsyta, styra dem individuellt och som ett team, både i deras rörelse och armrörelser (dvs. förlängning eller indragning).
"En viktig fördel med ShapeBots är att de är billiga, eftersom de är gjorda av enkel elektronik och vanliga material, "Do and Gross sa." Vi monterade robotarna för hand, var och en kostar ~ US $ 25 att göra. Dessutom, ShapeBots erbjuder ett mångsidigt sätt att "fysikalisera" information (data). "
Många tidigare studier har undersökt sätt att visualisera och visa information på 2-D-skärmar. ShapeBots som utvecklats av detta team av forskare, å andra sidan, utöka dynamisk datavisualisering till 3D-miljöer, tillåter användare att fysiskt interagera med information som presenteras för dem.
I motsats till andra robotar, ShapeBots kan ändra form och svärmkonfiguration genom att förlänga eller dra tillbaka armarna. De har kapaciteten hos de flesta robotsvärmar; men de kan också kollektivt visa data för användare via sina transformationer.
För att ändra form, robotarna utnyttjar små och tunna (2,5 cm) ställdon inspirerade av mekanismen bakom måttband, som kan förlängas upp till 20 cm både horisontellt och vertikalt. Dessa ställdon har en modulär design som möjliggör svärmstransformationer till en mängd olika former och geometrier.
"Vår studie visar att vi kan använda en svärm av små billiga robotar för att interagera med information, överbrygga den fysiska och digitala världen, "Do and Gross sa." Men ShapeBots vi utvecklat är fortfarande en prototyp. De är relativt robusta i en laboratoriemiljö, men de skulle inte hålla länge i ett klassrum i tredje klass. "
Än så länge, forskarna har använt formskiftande robotar för att slutföra enkla praktiska och visualiseringsuppgifter, som att städa upp ett skrivbord eller visa befolkningen av stater på en amerikansk karta. Eftersom den självtransformerande robotsvärmen fortfarande är en prototyp, dock, laget måste göra det perfekt och utföra ytterligare tester innan det kan introduceras i verkliga miljöer.
Forskarna skulle så småningom vilja minska storleken på robotarna, samtidigt som man sänker tillverkningskostnaderna och ökar deras tillförlitlighet. Faktiskt, i den storlek de är nu, användare kan bara passa ett dussin ShapeBots på en bordsskiva samtidigt. Om robotarna var tio gånger mindre, dock, det kan vara över 100, vilket möjliggör visualiseringar med högre upplösning.
Shapebots kommer att presenteras vid den kommande UIST (User Interface Software Technology) konferensen i New Orleans den 22 oktober. I deras papper, forskarna lyft fram ett antal olika inställningar där de kan vara användbara, inklusive skolor, museer, och andra inlärningsmiljöer.
"Vi tittar nu också på hur man programmerar beteendet hos en större svärm av robotar som kan ändra deras former, "Do and Gross tillagd." Att programmera dem en efter en är opraktiskt när du har hundra eller fler robotar, så vilket 'språk' kan vi utforma för att kontrollera deras beteende och interaktion? Och tänk om vi kunde få dem från bordsskivan och ner på golvet, väggarna, eller ens svävar i rymden? "
© 2019 Science X Network