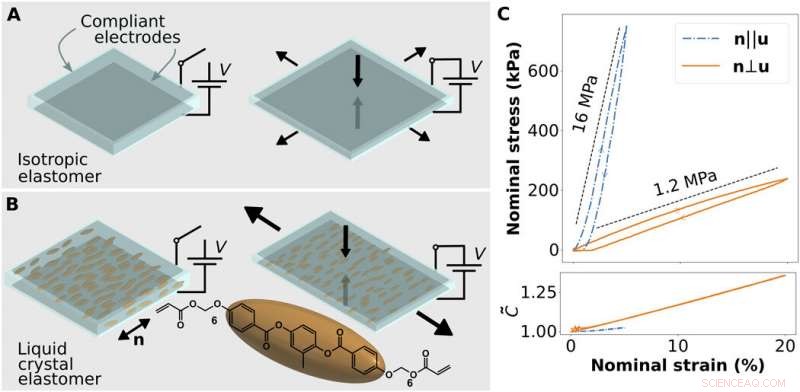
Enhetsschema, mekanisk, och elektrisk karakterisering. (A) Schematisk beskrivning av ett traditionellt isotropt DE-ställdon i av och på tillstånd. (B) Schematisk beskrivning av ett uniaxiellt inriktat dielektriskt LCE-ställdon (DLCEA) i av och på tillstånd. Flytande kristall molekylär inriktning; regissören, n, indikeras av en dubbelpil och definierar LCE:ns styvare riktning. När den påverkas av en spänning, V, materialet förtunnas och sträcker sig vinkelrätt mot inriktningen mer än parallellt med direktören. (C) DLCEA:s mekaniska spänning och normaliserade kapacitans (C~) svar på töjning över DLCEAs linjära regim karakteriseras vid en töjningshastighet på 0,1 % per sekund. Upphovsman:Science Advances, doi:10.1126/sciadv.aay0855
Materialforskare strävar efter att använda bioinspirerade mjuka robotar för att utföra avancerade interaktioner mellan människor och robotar, men den tillhörande tekniken återstår att utveckla. Till exempel, Mjuka ställdon måste prestera snabbt med kraft för att leverera programmerbara formändringar och enheterna ska vara lätta att tillverka och energieffektiva för obundna applikationer. I en ny rapport om Vetenskapliga framsteg , Zoey S. Davidson och ett tvärvetenskapligt forskarteam vid avdelningarna för fysisk intelligens, Materialvetenskap och teknik, och School of Medicine i Tyskland, USA och Turkiet, kombinerade flera egenskaper av intresse med två distinkta system för aktiva material för att bygga mjuka robotar.
Forskarna integrerade snabb och högeffektiv aktivering med dielektriska elastomerer (DE) och riktad formprogrammerbarhet med flytande kristallelastomerer (LCE). Genom att använda topdown-fotojusteringstekniker, de programmerade sedan molekylär inriktning och lokaliserade jätteelastisk anisotropi i flytande kristallelastomererna. Forskarna utvecklade linjärt aktiverade flytande kristallelastomermonoliter med töjningshastigheter över 120 procent, per sekund, och en energiomvandlingseffektivitet på 20 procent vid förflyttning av laster över 700 gånger vikten av elastomeren. Mekanismen kommer att möjliggöra nya forskningsmöjligheter i miniatyriserad formprogrammerbarhet och effektivitet tillsammans med ökade frihetsgrader för applikationer inom mjuk robotik inom tvärvetenskaplig forskning.
Forskare inom materialrobotik anser att kompatibla ställdon är nyckeln som saknas för att skapa effektiva gränssnitt mellan människor och robotar. Kompatibla mjuka ställdon kommer helst att vara mycket effektiva, bibehålla förhållandet mellan styrka och vikt, arbetskapacitet och formprogrammerbarhet för att slutföra komplexa funktioner. Mjuka ställdon med sådana egenskaper kommer att fungera ungefär som en konstgjord muskel med avancerade applikationer inom rymd, robotik, medicinska apparater, energiupptagningsanordningar och i bärbara enheter. Bland de varianter av mjuka ställdon som utforskats, dielektriska elastomerer (DE) är de mest lovande. Parallellt, flytande kristallelastomerer (LCE) kan genomgå reversibel mekanisk deformation med hjälp av ljus och termisk aktivering nära fasövergångstemperatur. Framsteg inom fotojustering och mikrofabrikation har gjort det möjligt för forskare att förprogrammera flytande kristalljustering i mikroskopiska regioner för komplex formformning. Dock, befintliga mekanismer kräver flerstegs tillverkningsmetoder, medan ansträngningar för att överföra elektrisk energi till mekaniskt arbete med LCE är begränsade på grund av den lilla belastning de genererar.
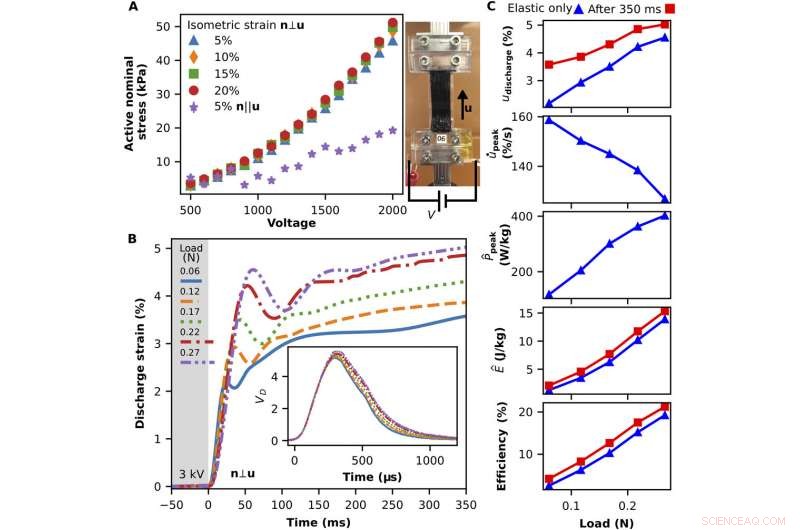
Karakterisering av uniaxial DLCEA demonstrerar kapaciteten hos en DLCEA ställdonenhet. (A) Isometriska (konstant töjning) tester. Uppmätt aktiv nominell spänningsreduktion med olika initiala isometriska töjningar (u) för enheter monterade med LCE-direktören n⊥u och n‖u och ett fotografi av en sammansatt DLCEA-enhet med n⊥u. (B) Isotoniska (konstant kraft) tester. Kontraktila urladdningstöjningsbanor under olika belastningar mätta av en höghastighetskamera med aktiveringsspänningar på 3 kV. Insättning:Motsvarande mätningar av elektrisk urladdning. (C) Grundläggande ställdonskarakteristika beräknas från kontraktionsbanan och mätning av urladdningsströmmen som finns i (B), inklusive stam (u), topptöjningshastighet (u˙peak), toppspecifik effekt (Pˆpeak), specifik energi (Eˆ), och effektivitet. Fotokrediter:Zoey S. Davidson. Upphovsman:Science Advances, doi:10.1126/sciadv.aay0855
I det nuvarande arbetet, Davidson et al. mönstrad LCE (flytande kristallelastomerer) för att skräddarsy rumslig variation av mekanisk överensstämmelse (överför en ingångskraft och förskjutning genom elastisk kroppsdeformation) och utveckla mer effektiva dielektriska elastomermanövreringsorgan med förprogrammerbarhet och aktiveringsriktning (kompression). I allmänhet, DE (dielektrisk elastomer) ställdon fungerar med hjälp av elektrostatisk attraktion mellan två kompatibla elektroder skapade på motsatta sidor av en isotrop DE för att konstruera en variabel motståndskondensator. Hög spänning som appliceras på de eftergivliga elektroderna kan inducera ett elektrostatiskt tryck känt som Maxwell-spänning för att deformera DE; för elektrisk manövrering. Denna mekanism kan ge en högre driftseffektivitet och högre aktiveringshastighet än för LCE:er. Dock, trots några imponerande resultat, DE-ställdon har ännu inte fått någon utbredd användning inom mjuk robotik på grund av befintliga utmaningar som kan övervinnas med hjälp av innovativa material för att konstruera nästa generations, högpresterande DE med formprogrammerbarhet.
Davidson et al. direkt utforskat den stora mekaniska anisotropin (för att förbättra lokalisering av töjningar) av LCE -material med hjälp av elektrisk aktivering, utan att förlita sig på molekylär rotation. De inkluderade de senaste framstegen inom materialvetenskap för att konstruera högeffektiva och formprogrammerbara DEs; kallas dielektriska LCE-aktuatorer (DLCEA). Forskarna anpassade LCE-molekyler i lokala domäner för att uppnå eldriven aktivering och tillåta formformning vid rumstemperatur för att visa stora, snabba och kraftfulla påfrestningar.
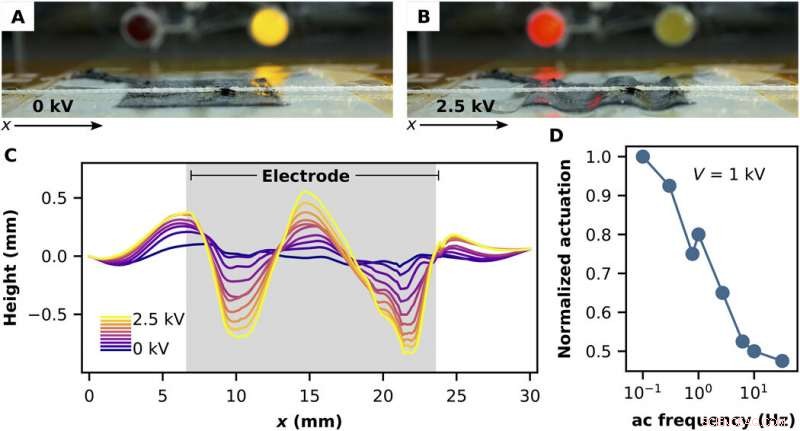
Enaxlig ut-ur-plan buckling DLCEA. (A) Av och (B) på tillstånd för en enaxlig DLCEA-enhet med fast gränsvillkor. Expansion längs den mjuka riktningen skapar buckling utanför planet, som förskjuter en fin tråd som hålls spänd över ytan. (C) Experimentell mätning av buckling som en funktion av den pålagda spänningen. (D) Frekvenssvar för knäckande enaxlig DLCEA vid 1 kV. Aktiveringsamplituden på 0,1 Hz är cirka 130 μm. Fotokrediter:Zoey S. Davidson. Upphovsman:Science Advances, doi:10.1126/sciadv.aay0855
Forskargruppen utvecklade LCE-filmerna i en tvåstegsprocess; först, de utvecklade kort en oligomer, följt av LCE-filmtillverkning med användning av en tiolakrylat-klickreaktion. De justerade det exakta förhållandet mellan komponenter, valet av monomer och ditiollinker, för att justera de önskade mekaniska egenskaperna hos den slutliga LCE-filmen. Arbetet producerade stora områden av välordnad enaxlig LCE med stor elastisk anisotropi. Forskarna applicerade kompatibla fettelektroder på båda sidor av LCE-filmen för att skapa DLCEA-enheterna (dielektriska LCE-aktuatorer).
Davidson et al. karakteriserade (testade) sedan materialen med början med monodomän uniaxiellt inriktade LCE-filmer. Nästa, de testade de enaxliga DLCEAerna i isometriska (konstant töjning) och isotoniska (konstant kraft) konfigurationer. Till exempel, under isometriska tester, de applicerade initiala stammar på DLCEA -enheter och tillät avkoppling innan de applicerade en högspänning för elektrisk aktivering. Under isopotentiella tester (där varje punkt i en region eller ett utrymme har samma potential), forskarna ansträngde DLCEA under en konstant spänning för att indikera förväntad aktivering.
Demonstration av enaxlig buckling DLCEA. En uniaxiellt inriktad DLCEA spänner när den laddas med en 2,5 kV potential och plattar sedan till när elektroderna laddas ur. Strängen som hålls inlärd över DLCEA hjälper till att visualisera aktiveringen men förskjuts också något av bucklingen. Upphovsman:Science Advances, doi:10.1126/sciadv.aay0855
Använder samma DLCEA, forskargruppen utförde isotoniska tester genom att suspendera en mängd olika vikter från enhetens fria ände för att generera konstanta belastningskrafter och initiala nominella töjningar. De släppte sedan plötsligt den vägda DLCEA-enheten och fångade efterföljande rörelser med en höghastighetsvideo. När den experimentella belastningen och belastningen ökade, kapacitansen för DLCEA ökade.
Under komplex formaktivering, gränsförhållanden spelade en betydande roll för att bestämma formförändringen av DLCEA. Forskargruppen förstod randvillkorens roll genom att karakterisera bucklingseffekten orsakad av elastomerens expansion mellan fasta gränser, de observerade ökande buckling amplitud med ökande spänning. Aktiveringstoppen var också en annan egenskap av intresse för DLCEA-applikationer, forskarna mätte förändringen i aktiveringsamplitud som en funktion av applicerad frekvens med hjälp av en sinusformigt varierande 1-kV potential. Även om aktiveringsamplituden avtog exponentiellt med frekvensen, forskarna mätte parametrarna (50 µm) vid 30 Hz och 1 kV.
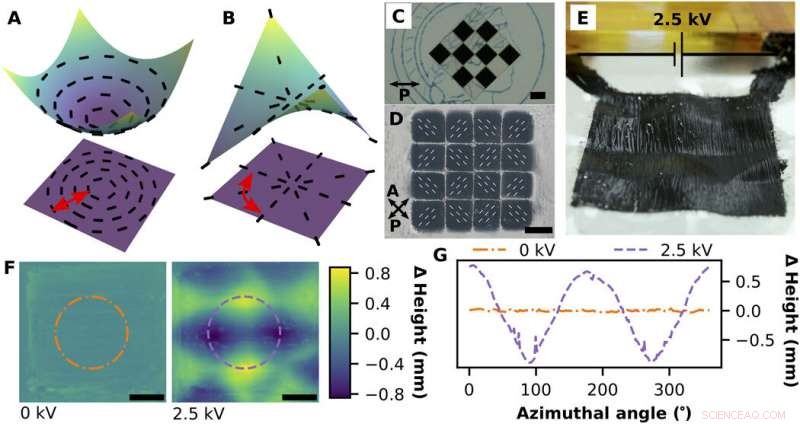
Pixelerad DLCEA. Programmerad formaktivering, såsom deformation av gropar, är möjligt genom att mönstra riktningskonfigurationen till ett azimutal-radiellt defekt gitter. (A) Azimutala defekttyper deformeras till en kon med lokalt positiv Gaussisk krökning, och (B) radiella defekttyper deformeras till en antikotte med lokalt negativ (sadelliknande) gaussisk krökning. I (A) och (B), de tvåhuvudiga röda pilarna anger den mjuka riktningen. (C) Defekterna mönstras med hjälp av en pixelerad uppsättning polariserande filmer med de utformade lokala orienteringarna. (D) sett genom korsade polarisatorer, den tillverkade LCE -filmen har pixelerad enaxlig inriktning, indikeras med streckade vita linjer, bildar ett defekt galler. (E) Vid laddning till 2,5 kV, det finns en stor synlig deformation av ytan. (F) Profilometri uppmätt höjdkarta för den fettbelagda LCE är nästan platt utan laddning och varierar över 1,6 mm vid laddning till 2,5 kV. Streckpunkterna och streckcirklarna i (F) är höjdspår som avbildas i (G). Förändringen från ungefär konstant höjd till en sinusformigt varierande höjd indikerar en förändring i tecken på den lokala Gaussiska krökningen. Skala staplar, 4 mm. Fotokrediter:Zoey S. Davidson. Upphovsman:Science Advances, doi:10.1126/sciadv.aay0855
För att sedan visa förmågan att förprogrammera komplexa mönster i 2D, följt av elektrisk aktivering av filmerna till 3D-former, forskarna designade rumsligt varierande LCE-direktörskonfigurationer. De observerade att LCE-filmen böjde sig ut ur plan med lokalt positiv eller negativ Gaussisk krökning för att bilda koner eller anti-kondeformation i elastiska medier. Davidson et al. observerade den lokalt programmerade höjdförändringen och åtföljande bildning av Gaussisk krökning i den experimentella enheten. Forskarna tillskriver den observerade höga effektiviteten i systemet anisotropin av elasticitetsmodulen och Poissons förhållande. Materialet Poissons förhållande anisotropi är en viktig egenskap som kan tillåta programmerad formändringsaktivering. Genom mekanism, den aktiverade eller komprimerade LCE:n kan expandera i tvärled för att skapa en formförändring. Den experimentella metod som utvecklats i detta arbete kan generaliseras för att skapa en stor mängd programmerbara formförändringar. Följaktligen, när ett elektriskt fält appliceras på DLCEA, enheten kan producera vridna rörelser, där storleken kommer att bero på materialets inneboende egenskaper och på LCE-geometrin.
På det här sättet, Zoey S. Davidson och kollegor kombinerade önskade egenskaper hos DE:er och LCE:er inom en enda materialplattform för att bilda elektriskt aktiverade DLCEA:er med överlägsen aktiveringsprestanda. Enheterna visade hög energiomvandlingseffektivitet (20 procent), hög aktiveringshastighet (120 procent per sekund) och programmerbar formändring från 2-D till 3-D med mer än 1, 800 procent slag utanför planet. För större manöverkrafter, forskargruppen överväger flerskiktiga DLCEA-stackar.
De insikter som ges i detta arbete i aktiva materialintegreringstekniker och mekanismer för elektroaktivering kan erbjuda fler spännande möjligheter. Metoderna kan kombineras med 3D-utskrift, origami och kirigami aktiveringsstrategier för att skapa multifunktionella mjuka robotar med låga kostnader och hållbara material som sparsamma uppfinningar. Den utvecklade mekanismen kan också tillämpas på andra tekniker som energiskörd och lagring, för medicinsk utrustning, bärbar teknik och flyg.
© 2019 Science X Network