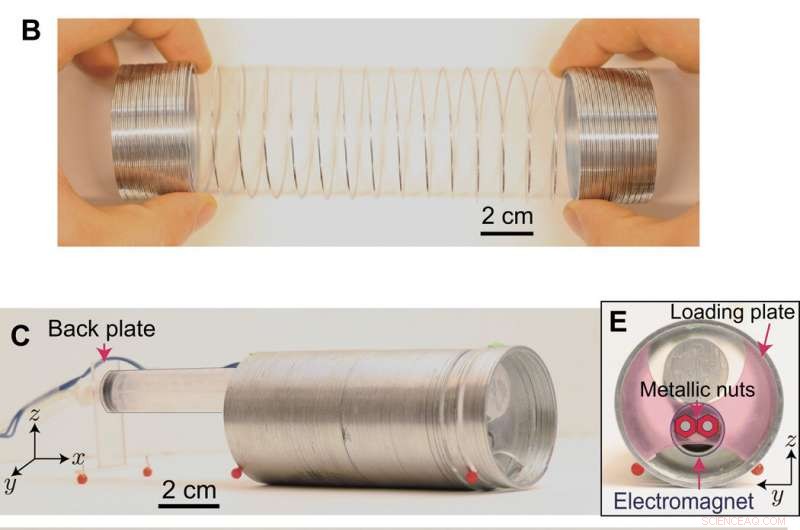
Slinky-roboten. (A) Schematisk visar lokmekanismen för en daggmask baserad på retrograd peristaltiska vågor (dvs. vågor som sprider sig i motsatt riktning till rörelse). (B) Bild på metallic Slinky som används i denna studie. (C och D) Bilder på vår Slinky-robot (C) före och (D) efter att det pneumatiska ställdonet är förlängt. (E) Framifrån av Slinky-roboten som visar elektromagneten. Observera att flera röda plastkulor är limmade på Slinky för att förhindra att det rullar. Foto:Bolei Deng, Harvard Universitet. Upphovsman:Science Advances, doi:10.1126/sciadv.aaz1166
Forskare har nyligen utforskat de unika egenskaperna hos olinjära vågor för att underlätta ett brett spektrum av applikationer, inklusive effektreducering, asymmetrisk transmission, växla och fokusera. I en ny studie nu publicerad på Vetenskapliga framsteg , Bolei Deng och ett team av forskare vid Harvard, CNRS och Wyss Institute for Biologically Inspired Engineering i USA och Frankrike utnyttjade utbredningen av olinjära vågor för att få flexibla strukturer att krypa. De kombinerade bioinspirerade experimentella och teoretiska metoder för att visa hur en sådan pulsdriven rörelse kunde uppnå maximal effektivitet när de initierade pulserna var solitons (solitärvåg). Den enkla maskinen som utvecklats i arbetet kan röra sig över ett brett spektrum av ytor och styra vidare. Studien utökade utbudet av möjliga applikationer med olinjära vågor för att erbjuda en ny plattform för flexibla maskiner.
Flexibla strukturer som kan stor deformation lockar intresse för bioingenjörer på grund av deras spännande statiska svar och deras förmåga att stödja elastiska vågor med stor amplitud. Genom att noggrant kontrollera deras geometri, det elastiska energilandskapet för mycket deformerbara system kan konstrueras för att sprida en mängd olinjära vågor inklusive vektorsolitoner, övergångsvågor och sällsynta pulser. Det dynamiska beteendet hos sådana strukturer visar en mycket rik fysik, samtidigt som man erbjuder nya möjligheter att manipulera spridningen av mekaniska signaler. Sådana mekanismer kan tillåta enkelriktad spridning, vågledande, mekanisk logik och begränsning, bland andra applikationer.
I det här arbetet, Deng et al. inspirerades av den biologiska retrograd peristaltiska vågrörelsen i daggmaskar och förmågan hos linjära elastiska vågor att generera rörelse i ultraljudsmotorer. Teamet visade spridning av olinjära elastiska vågor i flexibla strukturer för att ge möjligheter till rörelse. Som bevis på konceptet, de fokuserade på en Slinky-och använde den för att skapa en pulsdriven robot som kunde driva sig själv. De byggde den enkla maskinen genom att ansluta Slinky till ett pneumatiskt ställdon. Teamet använde en elektromagnet och en platta inbäddad mellan slingorna för att initiera olinjära pulser för att sprida sig längs enheten från framsidan till baksidan, så att pulsriktningen kan diktera den enkla roboten att gå framåt. Resultaten indikerade att effektiviteten hos en sådan pulsdriven rörelse var optimal med solitoner-olinjära pulser med stor amplitud med konstant hastighet och stabil form längs utbredningen. Studien utvidgade tillämpningar av ensamma vågor (solitons) samtidigt som de visade hur de kan utforskas som enkla underliggande motorer för att hjälpa flexibla maskiner att röra sig.
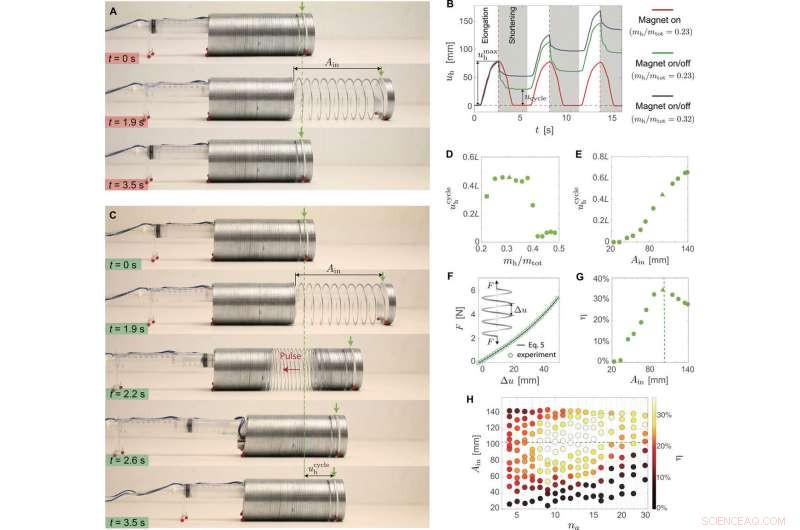
Prestanda för Slinky-roboten. (A) Ögonblicksbilder tagna under ett test där vi förlänger de 10 främre slingorna till Ain =100 mm medan vi håller elektromagneten på. (B) Förskjutning av huvudet under tre cykler för tester där (i) mh/mtot =0,23 och vi håller elektromagneten på (röd linje), (ii) mh/mtot =0,23 och vi stänger av elektromagneten efter sträckning (grön linje), och (iii) mh/mtot =0,32 och vi stänger av elektromagneten efter sträckning (blå linje). (C) ögonblicksbilder tagna under ett test där Ain =100 mm och vi stänger av elektromagneten efter att ha sträckt de främre öglorna. (D) Utveckling av u -cykeln h som en funktion av mh/mtot för tester där Ain =100 mm. De kvadratiska och triangulära markörerna motsvarar mh/mtot =0,23 och 0,32, respektive. (E) Utveckling av u -cykeln h som en funktion av Ain för tester där mh/mtot =0,32. Den triangulära markören motsvarar Ain =100 mm. (F) Statiskt svar av Slinky mätt i ett uniaxialt test. (G) Evolution av η som funktion av Ain för tester där mh/mtot =0,32. De triangulära markörerna motsvarar Ain =100 mm. Den gröna streckade linjen motsvarar amplituden för den stödda soliton, Som. (H) Evolution av η som en funktion av na och Ain för tester där mh/mtot =0,32. Foto:Bolei Deng, Harvard Universitet. Upphovsman:Science Advances, doi:10.1126/sciadv.aaz1166
För att skapa Slinky -roboten, Deng et al. använde en metall Slinky med en längd på 50 mm och 90 öglor, för att sedan testa och förstå hur man utforskar dess inneboende flexibilitet, och skapa en enkel maskin som kan röra sig. De kopplade två slinkies i serie (100 mm, 180 slingor) för en enkel aktiveringsstrategi baserad på en pneumatisk ställdon, en elektromagnet och tre akrylplattor. De kan sträcka ut och förkorta installationen med hjälp av det pneumatiska ställdonet medan elektromagneten hålls på. Teamet testade maskinens svar genom att placera den på en slät yta och övervaka den med en höghastighetskamera. Deng et al. stängde sedan av magnetfältet i ett försök att bryta symmetri och få maskinen att krypa. De observerade inte en reflekterad våg i Slinky på grund av den stora energiförlusten vid slingornas kollision och observerade istället tydlig rörelse framåt av roboten. Teamet undersökte därför riktningen som de elastiska vågorna introducerade för att få roboten att röra sig - även i närvaro av identiska friktionskoefficienter.
Förökning av icke-linjära vågor. En slinky med 90 öglor lyfts från underlaget och stöds av en plaststav för att minimera friktionen. Genom att försträcka 10 slingor nära fronten och stänga av den magnetiska elektromagneten initierar vi elastiska vågor som sprider sig mot baksidan. De gröna markörerna används för att spåra förskjutningen av varannan slinga. Se hela filmen om Credit:Science Advances, doi:10.1126/sciadv.aaz1166
Försök att få den flexibla maskinen att krypa via elastiska pulser avslöjade dock att experimentella förhållanden var suboptimala. Till exempel, de märkte bakåtvänt omedelbart efter att de stängt av elektromagneten. För att begränsa denna rörelse, Deng et al. ökade massan i spetsen för Slinky -roboten samtidigt som värdet optimerades för att identifiera ett optimalt intervall. Slinky höll 10 slingor mellan fronten och lastplattorna i installationen. Teamet utsåg det maximala avståndet mellan lastnings- och frontplattorna som A i , som är ungefär 100 mm. För att förstå hur robotens effektivitet var maximalt för A i =100 mm Deng et al. undersökte noggrant utbredningen av storamplitudpulser genom Slinky.
För dessa experiment, de fokuserade på en enda Slinky och övervakade positionen för gröna markörer som ligger vid varannan slinga. De initierade sedan elastiska vågor som förökade sig bakåt genom att försträcka 10 öglor nära fronten och stänga av elektromagneten. Testerna gjorde att laget kunde samla djupare insikter om hur pulser sprider sig genom att övervaka förskjutningen av varje slinga. Forskarna insåg två huvuddrag hos roboten; 1) de bakåtförökande vågorna förflyttade Slinky-massans centrum framåt och 2) Slinky stödde utbredningen av ensamma vågor med stor amplitud.
För na =4 är pulserna för starka, och deras energi försvinner via kollisioner mellan slingorna. För na =30 är pulserna för svaga och sprider sig knappt. Se hela filmen om Credit:Science Advances, doi:10.1126/sciadv.aaz1166
För att få ytterligare inblick i de experimentella resultaten, Deng et al. utvecklat en matematisk modell som representerar massan och elasticiteten för en individuell slinga. De beräknade resultaten matchade extremt bra med de experimentella resultaten och modellen bekräftade de experimentella observationerna. Analysen bekräftade vidare att Slinky -robotens effektivitet var högst när de initierade vågorna var solitoner. De ensamma pulserna och kompaktheten hos ensamma pulser gjorde dem extremt effektiva för att överföra energin från det pneumatiska ställdonet till rörelse för att få den mest effektiva pulsdrivna rörelsen.
På det här sättet, Deng et al. visade hur bakåtförökande solitoner effektivt kunde flytta en Slinky robot framåt. Även om obefläckade organismer tidigare har bioinspirerade ingenjörer för att designa en mängd olika robotar, teamet tror att detta arbete är det första robotsystemet som förlitar sig på elastiska pulser för att röra sig. De principer som presenterades i studien skilde sig från de som används av ultraljudsmotorer, eftersom den flexibla Slinky -roboten använde olinjära pulsvågor för att ändra positionen för masscentrum, ultraljudsmotorer drivs däremot av linjära sinusformade vågor. Teamet fokuserade bara på rätlinjig framåtgående krypning i detta arbete, men de kan utforska flexibiliteten hos Slinky för att uppnå en rad rörelser.
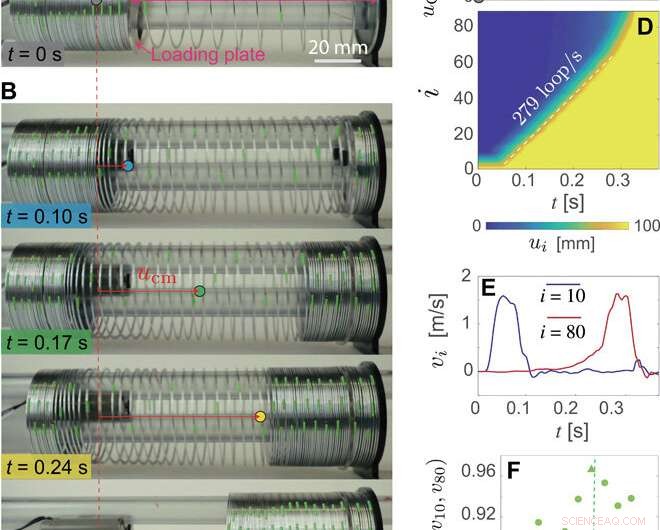
Vågutbredning i Slinky. (A) Experimentell installation som används för att testa utbredning av pulser i metalliska Slinky. Vid t =0 s, na =10 slingor mellan lastplattan och framsidan av Slinky sträcks till Ain =100 mm. (B) Ögonblicksbilder av pulsens utbredning i Slinky vid t =0,10, 0,17, 0,24, och 0,34 s. De cirkulära markörerna indikerar positionerna för Slinkys masscentrum. (C) Förskjutning av masscentrum för Slinky, uCM, som en funktion av tiden. Cirkulära markörer motsvarar de tidpunkter som beaktas i (A) och (B). (D) Spatiotemporal förskjutningsdiagram över den förökande pulsen. (E) Hastighetssignaler mätt vid 10:e och 80:e slingorna. (F) Utveckling av korskorrelationen av v10 (t) och v80 (t) som en funktion av ingångsamplituden Ain. Den triangulära markören motsvarar Ain =100 mm. Den gröna streckade linjen motsvarar amplituden för den stödda soliton, Som, förutses av ekvationer härledda i studien. Foto:Bolei Deng, Harvard Universitet. Upphovsman:Science Advances, doi:10.1126/sciadv.aaz1166
Teamet tänker därefter styra roboten genom att vrida den sista slingan på enhetens baksida och styra styrvinkeln, samtidigt som man betonar den befintliga möjligheten att flytta roboten över ett brett spektrum av ytor. Även om Deng et al. använde bara en Slinky för att realisera pulsdriven rörelse i detta arbete, principerna är allmänna och kan utökas till ett brett utbud av töjbara system över skalor för att öppna vägar för mikroskala sökrobotar som är lämpliga för medicinska applikationer.
© 2020 Science X Network