Frågan kan vara 2000-talets version av fabeln om sköldpaddan och haren:Vem skulle vinna i ett lopp mellan en robot och ett djur?
I en artikel i ett nytt perspektiv gav sig ett team av ingenjörer från USA och Kanada, inklusive robotisten Kaushik Jayaram vid University of Colorado Boulder, för att svara på den gåtan. Gruppen analyserade data från dussintals studier och kom fram till ett rungande "nej". I nästan alla fall verkar biologiska organismer, såsom geparder, kackerlackor och till och med människor, kunna springa undan sina robotmotsvarigheter.
Forskarna, ledda av Samuel Burden vid University of Washington och Maxwell Donelan vid Simon Fraser University, publicerade sina resultat förra veckan i tidskriften Science Robotics .
"Som ingenjör är det lite upprörande", säger Jayaram, biträdande professor vid Paul M. Rady Department of Mechanical Engineering vid CU Boulder. "Över 200 år av intensiv ingenjörskonst har vi kunnat skicka rymdfarkoster till månen och Mars och så mycket mer. Men det är förvirrande att vi ännu inte har robotar som är avsevärt bättre än biologiska system vid förflyttning i naturliga miljöer."
Han hoppas att studien ska inspirera ingenjörer att lära sig att bygga mer anpassningsbara, smidiga robotar. Forskarna drog slutsatsen att robotars misslyckande att springa undan djur inte kommer ner till brister i någon enskild maskin, såsom batterier eller ställdon. Istället där ingenjörer kan vackla är att få dessa delar att fungera effektivt tillsammans.
Denna strävan är en av Jayarams främsta passioner. Hans labb på CU Boulder campus är hem för många läskiga kryp, inklusive flera lurviga vargspindlar som är ungefär lika stora som en halv dollar.
"Vargspindlar är naturliga jägare," sa Jayaram. "De lever under stenar och kan springa över komplex terräng med otrolig hastighet för att fånga byten."
Han föreställer sig en värld där ingenjörer bygger robotar som fungerar lite mer som dessa extraordinära spindeldjur.
"Djur är i någon mening förkroppsligandet av denna ultimata designprincip – ett system som fungerar riktigt bra tillsammans", sa han.

Kackerlackaenergi
Frågan om "vem kan springa bättre, djur eller robotar?" är komplicerat eftersom att köra i sig är komplicerat.
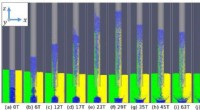
I tidigare forskning designade Jayaram och hans kollegor vid Harvard University en rad robotar som försöker efterlikna beteendet hos den ofta utskällda kackerlackan. Teamets HAMR-Jr-modell passar ovanpå en slant och spurtar i hastigheter som motsvarar en gepard. Men, noterade Jayaram, även om HAMR-Jr kan ta ett drag framåt och bakåt, rör den sig inte lika bra sida till sida eller över ojämn terräng. Ödmjuka kackerlackor har däremot inga problem att springa över ytor från porslin till smuts och grus. De kan också slå upp väggar och klämma sig igenom små sprickor.

För att förstå varför sådan mångsidighet fortfarande är en utmaning för robotar, delade författarna till den nya studien ner dessa maskiner i fem delsystem inklusive kraft, ram, aktivering, avkänning och kontroll. Till gruppens överraskning verkade få av dessa delsystem inte att nå sina motsvarigheter hos djur.
Högkvalitativa litiumjonbatterier kan till exempel leverera så mycket som 10 kilowatt effekt för varje kilogram (2,2 pund) de väger. Djurvävnad däremot producerar ungefär en tiondel av det. Muskler kan dock inte komma i närheten av att matcha det absoluta vridmomentet för många motorer.
"Men på systemnivå är robotar inte lika bra," sa Jayaram. "Vi stöter på inneboende designavvägningar. Om vi försöker optimera för en sak, som hastighet framåt, kan vi förlora på något annat, som vändförmåga."
Så, hur kan ingenjörer bygga robotar som, precis som djur, är mer än bara summan av deras delar?
Djur, noterade Jayaram, är inte uppdelade i separata delsystem på samma sätt som robotar. Dina quadriceps, till exempel, driver dina ben som HAMR-Jr:s manöverdon flyttar sina lemmar. Men fyrhjulingar producerar också sin egen kraft genom att bryta ner fetter och sockerarter och införliva nervceller som kan känna smärta och tryck.
Jayaram tror att framtiden för robotik kan komma ner på "funktionella underenheter" som gör samma sak:Istället för att hålla strömkällor åtskilda från dina motorer och kretskort, varför inte integrera dem alla i en enda del? I en artikel från 2015 föreslog CU Boulder-dataforskaren Nikolaus Correll, som inte var involverad i den aktuella studien, sådana teoretiska "robotmaterial" som fungerar mer som dina fyrhjulingar.
Ingenjörer är fortfarande långt ifrån att uppnå det målet. Vissa, som Jayaram, tar steg i denna riktning, till exempel genom hans labbs Compliant Legged Articulated Robotic Insect (CLARI) robot, en flerbensrobot som rör sig lite som en spindel. Jayaram förklarade att CLARI förlitar sig på en modulär design, där vart och ett av dess ben fungerar som en fristående robot med sin egen motor, sensorer och kontrollkretsar. Teamets nya och förbättrade version kallad mCLARI kan röra sig i alla riktningar i trånga utrymmen, en första för fyrbenta robotar.
Det är en sak till som ingenjörer som Jayaram kan lära sig av dessa perfekta jägare, vargspindlar.
"Naturen är en riktigt användbar lärare."
Mer information: Samuel A. Burden et al, Varför djur kan springa undan robotar, Science Robotics (2024). DOI:10.1126/scirobotics.adi9754
Journalinformation: Science Robotics
Tillhandahålls av University of Colorado i Boulder