 Optimus Prime i biped form, från filmen "The Transformers". Se mer bilder på robotar . Bild © 2007 Dreamworks Pictures
Optimus Prime i biped form, från filmen "The Transformers". Se mer bilder på robotar . Bild © 2007 Dreamworks Pictures Utan tvekan, HowStuffWorks -personalen är oroliga inför den kommande filmen "Transformers". Vi undrar inte bara om det kommer att bli bra. Vi undrar om vi kommer att se robotar med Transformers möjligheter under våra liv. Medan fullskaliga transformatorer verkar lite osannolika - och opraktiska - visar det sig att vissa befintliga robotar har mycket gemensamt med transformatorer. I den här artikeln, vi ska utforska hur dessa transformerande robotar ser ut, hur de fungerar och hur de liknar Transformers som Optimus Prime.
Vi börjar med en analys av Prime själv. Han är enorm och imponerande, men kan han någonsin vara verklig? Att få reda på, vi frågade ingenjör Michael D. Belote vad som skulle krävas för att bygga en traktorvagn i full skala som kan omvandlas till en tvåfotad robot. Med andra ord, vad skulle det krävas för att göra en livsformad version av Optimus Prime?
Först, Prime måste vara en självkonfigurerande robot . Några självkonfigurerande robotar, eller robotar som kan ändra sina former för att utföra olika uppgifter, finns idag. Dock, de skiljer sig mycket från Optimus Prime. Som Belote förklarar:
Med självkonfigurerbara robotar, ingenjören föredrar vanligtvis att behålla individen, mobila moduler små, enkel, billig, och utbytbara; när det gäller Optimus Prime, dock, vi har att göra med en robot vars enskilda moduler är lika stora som hytten på en halvbil. Även om det var möjligt att bygga sådana moduler, kostnaden skulle vara orimlig, och den extraordinära komplexiteten skulle göra det praktiskt taget omöjligt att någonsin få alla system att fungera korrekt tillsammans.Om ingenjörer kom på hur man gör utbytbara moduler i Optimus Prime -skala, Det kan fortfarande vara omöjligt att ge dem möjlighet att flytta dem. I hans fordonsform, Optimus Prime kan köras på vanligt dieselbränsle. Men att gå är mycket mindre effektivt än att rulla på hjul. För att gå, Prime skulle behöva mycket mer kraft än vad en dieselmotor skulle kunna ge. Här är Belotes analys av hur man hanterar Prime:s strömkrav:
Traditionella robotar är byggda på en av tre strömkällor-elektriska, pneumatisk, eller hydraulisk. På grund av de extrema vikter som är inblandade, hydraulisk kraft är den mest troliga källan för Prime, eftersom hydrauliska ställdon ger mycket höga effekt / vikt-förhållanden (stor effekt för små effektingångar).Så hydraulisk kraft kan låta Prime gå, men själva hydraulsystemet skulle skapa en annan uppsättning problem. "En tank eller reservoar måste läggas till för att hålla hydraulvätskan, säger Belote, "hydraulpumpar är nödvändiga; en sekundär kraftkälla måste användas för att driva pumpen; ventiler är nödvändiga för att uppfylla lämpliga tryck och flödeshastigheter." Dessutom, en hydrauliskt driven Prime måste fodras med rör för att transportera hydraulvätskan. Dessa rör, tillsammans med Prime bränsleledningar och elektriska ledningar, måste förbli oskadad eller till och med orörd under transformationen.
Efter att ha överlevt omvandlingen till robotform, Prime skulle då behöva gå som en biped. Belote beskriver vad som krävs för att detta ska hända:Eftersom traditionella semier ofta överstiger 30 ton i vikt, slutvikten på Prime kan lätt ligga i intervallet 35 till 40 ton. Jämför detta med världens bästa "gående" robot, Hondas ASIMO -robot, som har en totalvikt på 119 pund och ändå bara kan gå i cirka 40 minuter (eldriven) och med en maxhastighet på mindre än 2 mph. Viktförhållandet för ASIMO är 2,3 kg per tum, jämfört med viktförhållandet för Prime, som sannolikt skulle överstiga 75 till 80 lbs per tum-en trettiofaldig ökning.
Dessutom, robotar kan inte lätt efterlikna rörelsen med att gå. "Med en robot, "Belote förklarar, "det finns ett direkt kommando (lyft benets" x "-belopp, luta dig framåt 'y' belopp, förläng benet 'z' beloppet nedåt, och så vidare). Med människor, dock, det finns ingen "feedback" -mekanism - din hjärna kommunicerar inte hela tiden till dina ben om var de ska placeras. Istället, du lutar dig helt enkelt framåt och faller, "ställ ditt ben för att absorbera stötar när din fot kommer i kontakt med golvet."
Så det är inte troligt att vi skulle kunna se en fungerande Optimus Prime eller robot som honom under våra liv. Men robotar som kan ändra form eller bli någon form finns redan. Vi kommer att titta på några av dem - och hur de jämförs med Prime - i nästa avsnitt.
Innehåll
 Optimus Prime kan vara både en bipedal robot och en semi truck. Bild © 2007 Dreamworks Pictures
Optimus Prime kan vara både en bipedal robot och en semi truck. Bild © 2007 Dreamworks Pictures Det coolaste med transformatorer, självklart, är att de kan ta två helt olika former. De flesta kan vara bipedala robotar eller arbetsfordon. Vissa kan istället förvandlas till vapen eller elektroniska enheter. En transformators två former har mycket olika styrkor och kapacitet.
Detta är helt annorlunda än de flesta riktiga robotar, som vanligtvis bara är bra på att utföra en uppgift eller några relaterade uppgifter. Mars Exploration Rovers, till exempel, kan göra följande:
 En konstnärs återgivning av en Mars Exploration Rover på ytan av Mars Bild med tillstånd av NASA
En konstnärs återgivning av en Mars Exploration Rover på ytan av Mars Bild med tillstånd av NASA En Exploration Rover skulle inte vara särskilt bra på uppgifter som inte passar in i dessa kategorier. Det kan inte, till exempel, sätta ihop en bro, passa in i mycket små utrymmen eller bygga andra robotar. Med andra ord, det skulle göra en usel sök-och-räddningsrobot, och det skulle inte passa in alls i en automatiserad fabrik.
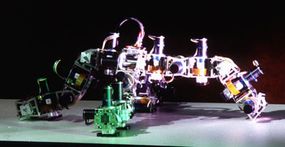
 NASAs Snakebot är ett exempel på en kedjerobot. Bild med tillstånd av NASA
NASAs Snakebot är ett exempel på en kedjerobot. Bild med tillstånd av NASA 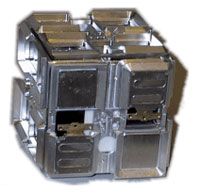 En Telecube G2 -modul Bild med tillstånd av Palo Alto Research Center Incorporated
En Telecube G2 -modul Bild med tillstånd av Palo Alto Research Center Incorporated Det är därför ingenjörer utvecklas omkonfigurera robotar . Som Transformers, dessa robotar kan ändra sin form för att passa uppgiften. Men istället för att byta från en form till en annan form, som en bipedal robot till en traktorvagn, omkonfigurera robotar kan ha många former. De är mycket mindre än riktiga Transformers skulle vara; någon omkonfigurerande robot moduler är tillräckligt små för att passa i en persons hand.
En modul är i huvudsak en liten, relativt enkel robot eller bit av en robot. Modulära robotar är gjorda av många av dessa små, identiska moduler. En modulär robot kan bestå av några få moduler eller många, beroende på robotens design och den uppgift den behöver utföra. Vissa modulära robotar finns för närvarande endast som datorsimuleringar; andra är fortfarande i de tidiga utvecklingsstadierna. Men de fungerar alla på samma grundläggande princip - massor av små robotar kan kombinera för att skapa en stor.
Moduler kan inte göra mycket själva. Ett omkonfigureringssystem måste också ha:
Mest modulär, omkonfigurera robotar passar in i en av tre kategorier:kedja, gitter och modulkonfiguration. Kedjerobotar är långa kedjor som kan ansluta till varandra vid specifika punkter. Beroende på antalet kedjor och var de ansluts, dessa robotar kan likna ormar eller spindlar. De kan också bli rullande öglor eller bipedala, gångrobotar. En uppsättning modulära kedjor kan navigera en hinderbana genom att krypa genom en tunnel som en orm, korsar stenig terräng som en spindel och åker på en trehjuling över en bro som en biped.
Exempel på kedjerobotar är Palo Alto Research Center (PARC) Polybot och Polypod och NASA:s Snakebot. De flesta behöver en människa eller i teorin, en annan robot, för att manuellt fästa anslutningarna med skruvar.
Simulerade robotar
Datorsimuleringar är en viktig del av robotforskning, särskilt med omkonfigurering av robotar. Forskare använder datorer för att räkna ut hur moduler kommer att röra sig i förhållande till varandra innan de lär modulerna hur man gör det. I vissa fall, datasimuleringar finns långt innan egentliga robotar. Massachusetts Institute of Technology (MIT) Rus Robotics Laboratory har många simuleringar av hur dessa robotar rör sig.
 Rus Robotics Laboratory's molekylmoduler har två kuber anslutna i en 90 graders vinkel. En yta på varje kub rymmer bindningen som ansluter den till den andra halvan av modulen. De andra fem ytorna kan fästas på andra moduler. Bild med tillstånd av Keith Kotay/Rus Robotics Laboratory
Rus Robotics Laboratory's molekylmoduler har två kuber anslutna i en 90 graders vinkel. En yta på varje kub rymmer bindningen som ansluter den till den andra halvan av modulen. De andra fem ytorna kan fästas på andra moduler. Bild med tillstånd av Keith Kotay/Rus Robotics Laboratory Grundtanken med a gitterrobot är det svärmar av små, identiska moduler som kan kombineras för att bilda en större robot. Flera prototypgitterrobotar finns redan, men vissa modeller finns bara som datorsimuleringar. Gitterrobotar rör sig genom att krypa över varandra, anslutning till och lossning från anslutningspunkter på närliggande robotar. Det är som hur brickorna rör sig i ett glidande kakelpussel. Denna rörelsemetod kallas omkonfigurering av substrat - robotarna kan bara röra sig längs punkter inom robotarnas gitter. Gittermoduler kan antingen ha fristående strömkällor, eller så kan de dela strömkällor genom sina anslutningar till andra moduler.
Gitterrobotar kan röra sig över svår terräng genom att klättra över varandra, efter terrängens form, eller de kan bilda ett fast ämne, stabil yta för att stödja andra strukturer. Tillräckligt med gitterrobotar kan skapa nästan vilken form som helst. Datorsimuleringar visar hur de byter från en hög med delar till en tekopp och från en hund till en soffa. Modulerna kan kombineras för att göra plana ytor, stegar, rörliga bilagor och praktiskt taget alla andra tänkbara former. Så en gitterrobot är mer som en Terminator T-1000 än en transformator.
Robotiklaboratorier har skapat och teoretiserat flera gitterrobotsystem:
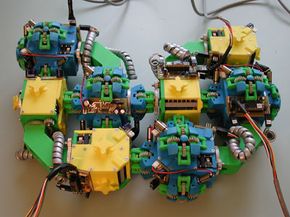
 Swarm-bots kan manövrera oberoende, eller de kan kombinera för att slutföra uppgifter som de inte kunde utföra ensamma. Bild med tillstånd av professor Marco Dorigo
Swarm-bots kan manövrera oberoende, eller de kan kombinera för att slutföra uppgifter som de inte kunde utföra ensamma. Bild med tillstånd av professor Marco Dorigo Som gitterrobotar, mobila omkonfigurationsrobotar är liten, identiska moduler som kan kombineras för att bilda större robotar. Dock, de behöver inte sina grannars hjälp för att komma från plats till plats - de kan röra sig på egen hand. Mobila konfigurationsrobotar är mycket som tecknade skildringar av fiskskolor eller fågelflockar som kombineras för att skapa ett verktyg eller en struktur. De rör sig oberoende tills de behöver gå ihop för att utföra en specifik uppgift. Swarm-bots , ett projekt av programmet Future and Emerging Technologies i Europeiska unionen, är mobila omkonfigurationsrobotar.
Även om dessa robotar ser väldigt olika ut från varandra, de har många likheter i hur de rör sig och fungerar. Vi kommer att titta på dessa nästa.
En riktigt riktig transformatorTransformatorer är inte nödvändigtvis praktiska eller ens möjliga i stor skala. Men ingenjörer på Himeji Soft Works har utvecklat en småskalig robot som verkligen vänder sig från en bil till en biped och tillbaka. Du kan se en video av denna robot, inklusive dess omvandling, på YouTube.
 Transformatorer är självmedvetna och kan fatta beslut på egen hand, men deras rörliga delar är inte autonoma. Bild © 2007 Dreamworks Pictures
Transformatorer är självmedvetna och kan fatta beslut på egen hand, men deras rörliga delar är inte autonoma. Bild © 2007 Dreamworks Pictures Förutom deras storlek och modulära struktur, självkonfigurerande robotar skiljer sig från transformatorer på ett stort sätt. Optimus Prime och andra transformatorer är självmedvetna och kan fatta oberoende beslut, och de håller sina hjärnor på en plats i sina kroppar. En transformators hjärna styr var och en av dess rörliga delar, och delarna själva har liten om någon självständighet.
I de flesta modulära robotkonfigurationer, fastän, varje modul har viss beslutskraft och hjälper till att räkna ut vart den ska flytta. Istället för att en modul är chef för alla andra, planerings- och rörelseförmåga är distribuerad i alla moduler.
Denna idé - en svärm av små robotar, var och en får bestämma vart det ska ta vägen - kan låta katastrofalt. Men modulerna är programmerade med en uppsättning geometribaserade regler om hur man rör sig. De är också programmerade med algoritmer som styr deras rörelse. Dessa algoritmer och regler tillåter robotarna att ta reda på hur man byter från en form till en annan och att röra sig över terrängen.
För mycket komplexa manövrar, robotarna planerar istället ut en serie underformer snarare än att försöka göra en stor förändring i ett steg. Till exempel, en gitterrobot som måste bytas från en slumpmässig hög med moduler till en tvåfotad robot kan först bilda benen. Sedan, den kan använda dessa ben som en byggnadsställning för att bygga den övre halvan av roboten.
 För närvarande, varje modulärt robotsystem har sina egna regler för hur det rör sig och omkonfigureras. Bild med tillstånd av Palo Alto Research Center Incorporated
För närvarande, varje modulärt robotsystem har sina egna regler för hur det rör sig och omkonfigureras. Bild med tillstånd av Palo Alto Research Center Incorporated Just nu, många av dessa robotar kan göra enkla övergångar från en form till en annan på egen hand. Mer komplexa förändringar kan kräva hjälp av en forskare, gör samlingen av robotar halvautonoma snarare än autonoma. Några robotar som fortfarande är i de tidiga utvecklingsstadierna får all sin instruktion från en datorarbetsstation och fattar inga beslut på egen hand.
För närvarande, de flesta omkonfigurerade robotar har ett eget system med regler och algoritmer, och regeluppsättningar fungerar bara för de robotar som de är utformade för. Med andra ord, reglerna för Rus Robotics Laboratory's Crystal fungerar inte med Molecule.
Dock, forskare använder datasimuleringar för att undersöka rörelseteorier som kan fungera oavsett hur en robotmodul ser ut. Dessa teorier kan fastställa grundregler för robotrörelser, Inklusive:
Om det lyckas, denna forskning kan göra det lättare för ingenjörer att göra nya, fungerande modulära robotar som följer samma regler för rörelse.
Även om dessa robotar inte går och pratar som Transformers gör, de kan förändras i praktiskt taget vilken form som helst, med rätt programmering och instruktioner. För att få veta mer om dem och om transformatorer, se länkarna på nästa sida.
Var håller transformatorer sina hjärnor?
När du arbetar med den här artikeln, HowStuffWorks -personalen hade en livlig diskussion om var Transformers behåller sina hjärnor. Vi intuierade alla samma svar - en transformators hjärna måste vara i huvudet (eller i sitt cockpit i fordonsform). Många serier och tecknade skildringar tycks stödja denna idé. Dock, det förklarar inte helt hur delar av Optimus Prime kan fungera separat, om inte Prime använder radio- eller infraröda signaler för att skicka och ta emot kommandon. Det förklarar inte heller helt varför Constructicons personligheter skiljer sig från deras komponenter Transformers. Du kan läsa mer om Transformers hjärnor och hur de fungerar på The Matrix, en inofficiell Transformers -tidning.
Källor














