Det är svårt att föreställa sig ett mer dramatiskt företag än rymdresor, där modiga själar förseglar sig i fantastiska fordon och sjösätts av kontrollerade explosioner i en miljö som är fientlig mot allt känt liv - allt i vetenskapens namn och mänsklig våg.
Att landa ett rymdskepp på månen hade inte varit detsamma utan astronauter. Genom deras kommentar, människor på jorden som tittade på de korniga svartvita bilderna av månlandskapet delade en koppling till det eviga och till det utomjordiska. Deras resa gav oss en gemensam upplevelse större än vad Hollywood kunde skapa, för det var riktigt.
Rymdresor tar ut sin rätt på astronauter eftersom människokroppen inte är anpassad till de hårda förhållandena som styr riket bortom vår atmosfär. Inuti en kapsel eller skyttel, rymdresenärer måste träna regelbundet för att avvärja förlusten av bentäthet och muskelatrofi som orsakas av långvariga perioder i mikrogravitation. Besättningsutrymmena måste sättas under tryck med rätt blandning av gaser som andas och vattenånga, och system måste cirkulera och vitalisera dessa gaser för att hålla luften andas. Temperaturen måste också regleras noggrant, att inte säga något om system för att leverera mat och vatten och slänga avfall.
relaterade artiklar
Utanför, astronauter stöter på temperaturer som kan svänga från 248 grader F (120 grader C) till minus 148 grader F (minus 100 grader C), och det är precis nära jorden. Temperaturen i djupt utrymme sjunker till minus 454 grader F (minus 270 grader C). Utan jordens atmosfär för att skydda dem från solens strålning, astronauter överlever genom att bära skrymmande rymddräkter som kostar miljoner dollar styck och inte är praktiska i en nödsituation. Om den internationella rymdstationen (ISS) träffades av ett föremål och behövde repareras omedelbart, det skulle ta en astronaut timmar att förbereda sig för en rymdpromenad och utföra reparationer [källa:Coulter, "Robonaut 2 startar i februari"].
NASA och andra rymdprogram känner igen människokroppens skröplighet och arbetar med sätt att få ut det mesta av sin astronauts tid samtidigt som de minskar deras exponering för fara. En av de mer spännande tillvägagångssätten som pågår har gett upphov till en ny astronautras, en som är bättre lämpad att överleva utanför rymdfarkoster.
I den här artikeln, vi lär oss om utvecklingen av dessa robotastronauter, eller robonauter , och hur de kommer att hjälpa människor i rymden.
Robotsonder och rovers har rest till Mars sedan innan vi landade på månen. År 1965, Mariner IV skickade tillbaka de första närbilderna av den röda planeten. 1997, de Stigfinnare rover gav oöverträffade detaljer om Mars -atmosfären och ytan. Dessutom, som kan glömma de anmärkningsvärda bidragen från Anda och Möjlighet , de två Mars -rovers som lanserades sommaren 2003 som överträffade deras ursprungliga uppdrag?
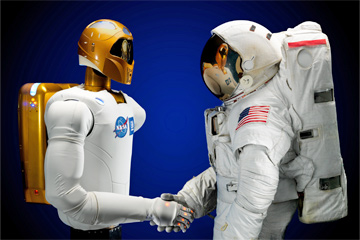
NASA har baserat sina robot -astronauter på en humanoid design. Den första av dessa, Robonaut 1 (aka R1 ), presenterade ett huvud, två ögon, två armar och två femsiffriga händer. Designers skyddade R1:s huvud med en hjälm av epoxiharts och monterade huvudet på en fogad hals, som gjorde det möjligt att vända från sida till sida och titta upp och ner. Inom den banbrytande robonauten, två videokameror levererade stereovision till operatören och gjorde det möjligt för R1 att spåra objekt. Stereovision efterliknar människosyn genom att jämföra bilder från höger och vänster "öga" (kamera) och använda parallax - den uppenbara skillnaden i ett objekts position som orsakas av varje ögats olika betraktningsvinkel- för att bestämma djup och detektera rörelse. R1:s armar hade större rörelseomfång än mänskliga armar och packade mer än 150 sensorer vardera.
NASA började bygga R1 år 1997, och det fungerade som en experimentell plattform för laboratorie- och fälttester fram till 2006. Det var ett framgångsrikt bevis på koncept, men det lämnade aldrig labbet.
Under 2006, NASA tecknade ett avtal med General Motors om att producera Robonaut 2 ( R2 ). GM utvecklade också fingerfärdiga robotar vid den tiden och hade arbetat med NASA på månrovern. NASA presenterade R2 i februari 2010, och robonauten reste till sitt permanenta hem på den internationella rymdstationen den 24 februari, 2011, på en av de sista rymdfärjan.
Som R1, R2 är utformat för att hjälpa människor och automatisera repetitiva, tråkiga eller tröttsamma uppgifter - som att ställa in de verktyg och utrustningar som är nödvändiga för uppdrag - frigöra astronauter att koncentrera sig på uppgifter som bara de är kvalificerade att utföra.
Tänk på R2 som R1-plus-mindre, billigare, mer avancerade och kapabla att överleva påfrestningarna och rymden. R2 levererar mer än 350 sensorer, 40 varav den använder för att upptäcka sin omgivning. Det inkluderar fyra synliga ljuskameror i ögonen och en femte infraröd kamera i munnen för att underlätta djupuppfattningen. Dess mage innehåller 38 datorprocessorer. Även om dess styrka är i nivå med R1:er - den kan lyfta cirka 9 kilo - är R2 mer skicklig med sina praktiska bilagor:medan R1:s händer liknade en astronauts handskade händer, R2 är mer som ogifta mänskliga händer.
R2 kan manipulera en filt, plocka upp ett kuvert och ta tag i en hantel, men dess fingerfärdighet är större än summan av dess delar. Användare kan kontrollera R2s ledstyvhet, vilket ger R2 ett ben upp över typiska "positionsstyrda" robotar som bilmonteringsrobotar, som saknar "ge" i sina system och måste ställa upp perfekt för att göra sitt jobb. En sådan robot skulle vara usel på att sätta en pinne i ett hål; även en liten inriktning skulle få den att krossa pinnen i området runt hålet. R2, omvänt, kan "känna" sig hem, flytta pinnen mjukt framåt och göra små, glidande korrigeringar om de är felriktade, som en människa skulle. R2:s flexibilitet gör det också säkrare för sina mänskliga följeslagare, som kan stoppa dess rörelse utan mycket kraft, för att undvika skador.
Här är specifikationerna för Robonaut 1 och 2:
Specifikationer Robonaut 1
Robonaut 2
Höjd 1,93 meter (1,0 meter) (midja mot huvud) Vikt 410 pund (182 kilo) 330 pund (150 kilo) Strukturella material
Mestadels aluminium med Kevlar och teflon vaddering för att skydda det från brand och skräp Främst aluminium med stål, förnicklad kolfiber och icke-metalliska Datorplattform
PowerPC -processor38 PowerPC -processorer Operativ system
VxWorksVxWorks
Oavsett framtiden för robonauter, tävlingen värms upp som en shuttle vid återinträde.
Robonaut 2 (R2), som sin föregångare, styrs med hjälp av telepresence, där en person - antingen en astronaut eller en operatör vid uppdragskontroll - styr roboten på distans medan han ser genom ögonen via inbyggda kameror. Operatören kan bära handskar för att styra R2:s händer, eller kontrollera R2:s huvudrörelser genom att bära en hjälm som är fjärrkopplad till robotens huvud.
R2 är inte bara en marionett, dock. Som Mars -roversna, robonauten arbetar också under övervakad autonomi, vilket innebär att den kommer laddad med sekvenser av kommandon (skript) som berättar hur man utför vissa uppgifter autonomt. En operatör övervakar sina framsteg under dessa åtgärder och kan göra korrigeringar vid behov i realtid. Förhoppningen är att R2 en dag ska ta examen från robo-trainee till robo-medarbetare och kräver mycket lite observation eller riktning.
Som R1, R2:s hjärnor består av en serie PowerPC-processorer-en teknik som används i andra rymdapplikationer-som kör operativsystemet VxWorks i realtid. NASA säger att denna kombination erbjuder flexibel databehandling och stöder varierande utvecklingsaktiviteter. Systemprogramvaran är skriven i C och C ++. ControlShell -programvara hjälper utvecklingsprocessen och tillhandahåller en grafisk utvecklingsmiljö, vilket förbättrar forskarnas förståelse av systemet och koden.
Initialt, R2 kommer att begränsas till ett labb på den internationella rymdstationen. Där, det kommer att köra tester med en serie kort med switchar, rattar och kontakter som astronauterna använder. Ingenjörer på marken kommer att skicka maskin- och programuppdateringar efter behov. Så småningom, R2 kommer att vara utrustad med ett eller flera ben komplett med tår som passar tåhållare inbyggda i stationens väggar, vilket gör att R2 kan klättra samtidigt som händerna är fria att bära utrustning eller utföra uppgifter.
Så småningom, R2 kommer att få utrustning för extravehicular activity (EVA) och kommer att kunna gå på rymdpromenader utanför stationen. Det kommer då att kunna inrätta arbetsplatser och minska tiden människor måste spendera ute. Eftersom den kan övergå mycket snabbare till utsidan än astronauter, R2 kommer också att kunna svara på nödsituationer. NASA arbetar med ett batteri (för närvarande måste R2 kopplas in) för att öka R2:s räckvidd, och framtida robonauter kan vara utrustade med hjul eller till och med en jetpack för undersöknings- och underhållsuppdrag. Inte heller kommer färdiga robotar som R2 att begränsas till att utforska rymden:En dag, de kan komma in på farliga platser på jorden i stället för människor, som vulkaner och kärnkraftverk.
Gå till nästa sida för mer robotläsning du kanske gillar.
relaterade artiklar
Fler fantastiska länkar
Källor