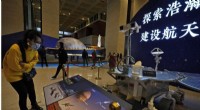
En kontrollant i Tyskland körde ESA:s griparutrustade Interact-rover runt ett simulerat månlandskap vid byråns tekniska hjärta i Nederländerna, att öva på att hämta geologiska prover. Kredit:ESA– SJM Photography
En kontrollant i Tyskland körde ESA:s griparutrustade Interact-rover runt ett simulerat månlandskap vid byråns tekniska hjärta i Nederländerna, att öva på att hämta geologiska prover. Samtidigt interagerade en mindre Tyskland-baserad rover med ESA:s rover som om de vore tillsammans på samma plats – i en generalrepetition för en robottestkampanj till Etnas månliknande vulkansluttning, planerad till nästa år.
Scenariot bakom denna veckas testning är att i framtiden, astronauter ombord på Lunar Gateway i rymden kommer att kunna köra rovers på månens yta, med hjälp av force-feedback-kontroller – som en avancerad speljoystick som trycker tillbaka på användaren – för att uppleva en realistisk känsla av känsel som kan jämföras med att faktiskt vara där.
Konceptet bevisades i princip under förra årets Analog-1-kampanj, utfört av ESA:s Human Robot Interaction Laboratory, med stöd av DLR German Aerospace Centers institut för robotik och mekatronik i Oberpfaffenhofen nära München.
Analog-1 avslutades med ESA-astronauten Luca Parmitano i omloppsbana ombord på den internationella rymdstationen som driver Interact-rovern på marken, guidad av high-fidelity syn och beröring för att utföra en geologisk provtagningsövning.
"Vår ursprungliga plan var att följa upp Analog-1 med en äkta geologisk fältundersökning, på Etna i Italien, " förklarar ESA:s robotingenjör Thomas Krueger, leder HRI Lab.
"Denna undersökning planerades som en del av DLR:s ARCHES—Autonomous Robotic Networks to Help Modern Societies—initiativ, att utveckla heterogena, autonoma och sammankopplade robotsystem i samband med en verklig applikation."

En kontrollant i Tyskland körde ESA:s griparutrustade Interact-rover runt ett simulerat månlandskap vid byråns tekniska hjärta i Nederländerna, att öva på att hämta geologiska prover. Rovern har två kameror, den ena monterad på en manövrerbar arm och den andra på griparen i änden av en annan arm. Kredit:ESA – SJM Photography
"Tyvärr gör pågående covid-19-restriktioner detta omöjligt för tillfället. Istället hade vi idén att föra samman rovers på virtuell basis:vi satte upp en gemensam nätverksinfrastruktur för att få dem att tro att de är tillsammans även om de inte är det – som en robotversion av en telefonkonferens – för att vara en fullskalig generalrepetition för vår Mount Etna-resa som nu har schemalagts till nästa sommar."
Testet kulminerade i att Interact-rovern kördes gemensamt från DLR mer än 660 km bort, tillsammans med European Space Operations Centre, ESOC, i Darmstadt, Tyskland, hjälpa till att välja ut och hämta geologiska prover – övervaka aktiviteterna i "rymden".
"Den här typen av experiment är väldigt viktiga för att vi ska kunna öva och skaffa oss operationserfarenhet, vilket är viktigt för ESA:s framtida robotiska månuppdrag, " konstaterar ESOC:s driftingenjör Thorsten Graber.
Anta rollen som uppdragskontroll, ESOC-sidan använde kommando- och visualiseringsverktyg på högre nivå som utvecklats av företaget Trasys.

En kontrollant i Tyskland körde ESA:s griparutrustade Interact-rover runt ett simulerat månlandskap vid byråns tekniska hjärta i Nederländerna, att öva på att hämta geologiska prover. Kredit:ESA – SJM Photography
"Vår rover har två kameror, en monterad på en manövrerbar arm och den andra på griparen i änden av en annan arm, " förklarar ESA:s robottekniker Edmundo Ferreira.
"Denna gripare styrs med hjälp av en Sigma 7 force-feedback-enhet med sex frihetsgrader, så att operatören kan känna när armen träffar marken eller tar upp en sten. Faktiskt, enheten som används på DLR är reservdelen för den force-feedback-enhet som Luca använde förra året, modifierad för rymden av Thales Alenia Space.
"När den används i rymden på riktigt, "latency" - eller signalfördröjning - kommer definitivt att vara ett problem, så vi har experimenterat för att se hur användare reagerar på ökande nivåer av fördröjning mellan ett kommando som ges och roverarmen reagerar."
Denna testning är den senaste i en serie av allt mer utmanande testkampanjer mellan människa och robot, gemensamt kallat Meteron—Multi-purpose End-to-End Robotic Operation Network.

En kontrollant i Tyskland körde ESA:s griparutrustade Interact-rover runt ett simulerat månlandskap vid byråns tekniska hjärta i Nederländerna, att öva på att hämta geologiska prover. En kontrollant i European Space Operations Centre, ESOC, i Darmstadt, , Tyskland, hjälpte till att välja ut och hämta geologiska prover – övervaka aktiviteterna i "rymden". Kredit:ESA

En kontrollant i Tyskland körde ESA:s griparutrustade Interact-rover runt ett simulerat månlandskap vid byråns tekniska hjärta i Nederländerna, att öva på att hämta geologiska prover. Kredit:ESA
"Vårt arbete har alltid fokuserat på att möjliggöra fjärroperationer, men på grund av covid-19-pandemin har vårt team fått träna på distansarbete helt enkelt för att göra denna testkampanj möjlig, tillägger Thomas.
"Så medan vi har samarbetat online för att utveckla kontrollmjukvara, vanligtvis har bara en enskild ingenjör arbetat i labbet samtidigt, med telefon- och onlinesupport från oss andra. Samtidigt manövrerades kontrollenheter hemma, att träna på att använda robotsystem i labbet."
Själva Interact-rovern håller på att uppgraderas, inklusive tillägg av dammskydd för dess armar och elektronik, inför nästa års Etna-resa.