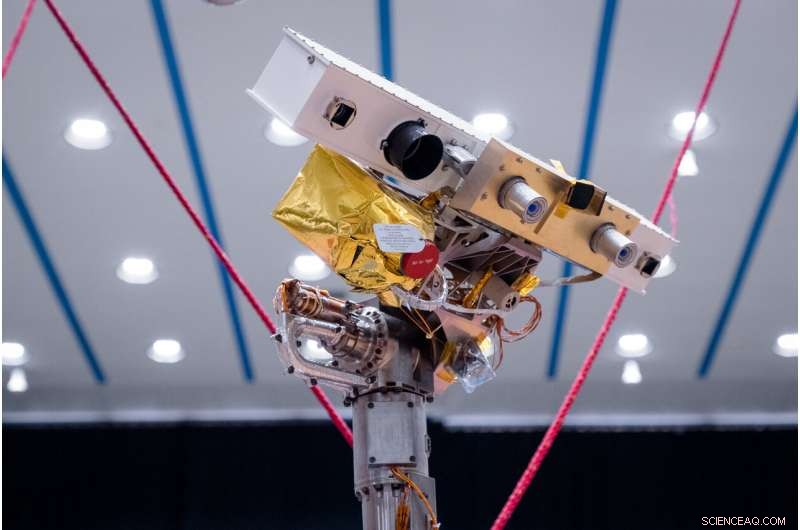
Två stereokameror högst upp och längst ner på roverns mast – NavCam och LocCam – gör att GTM kan "se" i tre dimensioner och identifiera stenarna och sluttningarna framför sig. Kamerorna guidar rovern genom säkra vägar och hjälper till att undvika faror. Kredit:Thales Alenia Space
De första vetenskapliga testerna för ExoMars rover-replika startade efter flera veckors körtester kring Mars Terrain Simulator i ALTEC-lokalerna i Turin, Italien.
Med rörelsesystemet igång, det är dags nu för roverns kameror och instrument att skanna en Mars-liknande terräng – både på och under ytan – i jakten på de bästa proverna.
Tvillingen till ESA:s Rosalind Franklin-rover, även känd som The Ground Test Model (GTM), har varit upptagen med att kartlägga 64 kvadratmeter terräng på en av Europas största Mars-gårdar, noggrant iscensatt med sandytor och stenar av olika storlekar, samt gravitations- och ljussimuleringar för att återskapa miljön på Mars.
Ser, knäppa, undersökning
Imaging kommer först. Två stereokameror högst upp och längst ner på roverns mast – NavCam och LocCam – gör att GTM kan "se" i tre dimensioner och identifiera stenarna och sluttningarna framför sig. Kamerorna leder rovern genom säkra vägar och hjälper till att undvika faror.
När rovern väl är i rörelse, ytterligare två uppsättningar kameror – PanCam och CLUPI – spelar in för att få en helhetsbild av webbplatsen med högupplöst bildbehandling. Dessa rover-ögon skickar panorama- och närbilder av terrängen till operatörerna vid Rover Operations Control Center (ROCC). Team från Thales Alenia Space och ALTEC arbetade i synergi med ESA-ingenjörer.
Bilderna är viktiga för att kartlägga det geologiska sammanhanget och för att hjälpa forskarna att bestämma var rovern ska stanna och undersöka ytan mer i detalj.
Att välja mål
Att hitta lämpliga prover innebär mycket mer än att bara upptäcka en häll och gräva. Rovern är utrustad med en markpenetrerande radar – WISDOM – och en neutrondetektor – ADRON – för att förstå vad som finns under ytan.
Sökandet efter bevis på liv på Mars är ett huvudmål för ExoMars 2022-uppdraget.
Om någonstans på Mars, spår av tidigare eller nuvarande liv finns med största sannolikhet under jorden, där gamla biologiska signaturer fortfarande kan bevaras från den hårda strålningen på den röda planeten.
Ungefär som arkeologer på jorden gräver ut platser, VISDOM kan fungera genom att analysera området på ett rutnätssätt – genom att bryta marken i små rutor. Neutronspektrometern i ADRON kommer att arbeta tillsammans med radarn för att upptäcka vatten och hydratiserade mineraler under ytan.

ExoMars-uppdraget kommer att se roveraren Rosalind Franklin landa på den röda planeten 2023. Roveren Rosalind har sex hjul och ett unikt sätt att förflytta sig över den röda planeten. Varje hjulpar är upphängt på en svängbar boggi så att varje hjul kan styras och köras oberoende. Repliken ExoMars rover – Ground Test Model (GTM) – som kommer att användas i Rover Operations Control Center för att stödja uppdragsutbildning och operationer genomför flera körtester kring Mars Terrain Simulator. Den här bilden visar GTM-körningen genom ojämn terräng. Kredit:Thales Alenia Space
Testfall för Mars
Operatörer repeterar alla möjliga uppdragsscenarier för att förbereda Rosalind Franklins ankomst till Oxia Planum på Mars i juni 2023.
De första testerna med vetenskap i aktion började med att rovern gjorde en travers för att karakterisera ett sandigt och platt område. Efter att ha strövat en stund, kamerorna matade operatörerna med stereo och högupplösta bilder.
När en plats som anses intressant nog att borra efter prover hittas, det var dags att få mer information underifrån.
Den markpenetrerande radarn WISDOM körde sin vetenskapliga analys var 10:e cm i 30 sekunder. När labbet med hjul täckte fem meter, den utförde två svängar på 90 grader och började om på en ny femmetersbana. I slutet av testet, WISDOM skannade ett rutnät på 25 kvadratmeter.
Ett andra test upprepade denna sekvens, denna gång med en mycket längre körning på åtta meter för ett mer långtgående vetenskapsinhämtning. Och istället för att stanna var halvmeter, GTM använde WISDOM varje meter.
I båda fallen, sekvensen fullbordades av neutrondetektorn, Adron, som gjorde mätningar för att leta efter spår av vatten. Nästa steg var utförandet av ett komplett WISDOM-rutnät på 25 kvadratmeter.

Repliken ExoMars rover – Ground Test Model (GTM) – som kommer att användas i Rover Operations Control Center för att stödja uppdragsutbildning och operationer under tester runt Mars Terrain Simulator i juli 2021. Den här bilden visar rovern när den når en liten kulle i Mars Terrain Simulator. Kredit:Thales Alenia Space
Var ska man borra?
Dessa torrkörningar simulerar sekvenserna som rover kommer att följa på Mars, där forskarna kommer att behöva bestämma vilket område som är värt att borra. Rosalind Franklin är försedd med en borr för att ta ut prover ner till max två meter, djupare än någon annan rover och en första i Mars-utforskningen.
Som en bonus under denna första vetenskapliga torrkörning, Rovern försökte borra på olika djup och genom ett lager av provmaterial som valts ut av ExoMars-teamet.
På Mars, provet som samlas in av borren kommer att krossas till ett fint pulver och levereras till det analytiska laboratoriet i hjärtat av rovern för att analysera dess mineralogi och kemi.
Utan sommaruppehåll för roveren, Kommande tester på Mars Terrain Simulator kommer att involvera analys av prover inuti roverns analyslabb. En uppsättning instrument – MicroOmega, Raman och MOMA – kommer att studera jordens mineralogiska och molekylära sammansättning.
Under det verkliga uppdraget till den röda planeten, resultaten av denna analys skulle kunna svara på frågor om det potentiella ursprunget, evolution och distribution av liv på Mars