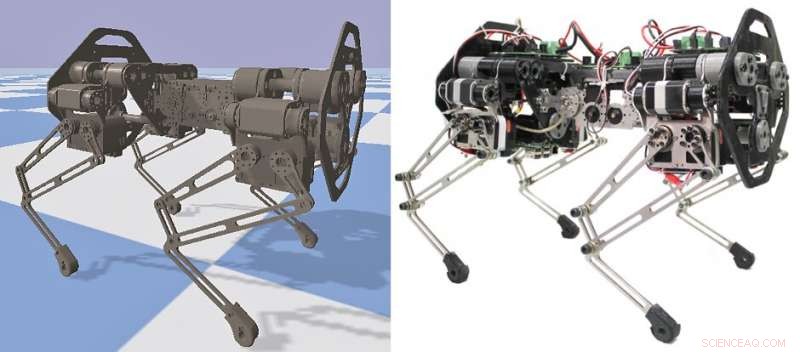
Kredit:Bhattacharya et al.
Forskare vid Robert Bosch centrum för cyberfysiska system i Bangalore, Indien, har nyligen föreslagit ett simuleringsramverk för att systematiskt studera effekterna av ryggradsledspåverkan på rörelseprestanda hos fyrfotarobotar. I deras studie, beskrivs i en tidning som förpublicerats på arXiv, de använde detta ramverk för att undersöka ryggradens beteenden hos en fyrbensrobot som heter Stoch 2 och deras effekter på dess gränsande prestanda.
"Denna forskning kom till när man utforskade grunden för snabb förflyttning hos fyrfota djur och robotar, Shounak Bhattacharya, en av forskarna som genomförde studien, berättade för TechXplore. "Det har varit välkänt sedan en tid tillbaka att små och medelstora fyrbenta djur använder flexibiliteten i sin ryggrad för att förbättra sin rörelsehastighet och energieffektivitet. Denna användning av flexibilitet inspirerade robotiker att utforska konceptet mer i detalj för att hitta en lösning till detta problem med hjälp av de matematiska verktyg som finns tillgängliga."
I motsats till tidigare forskare, Bhattacharya och hans kollegor satte sig för att undersöka ryggradens beteenden hos fyrbäddsrobotar med hjälp av maskininlärningstekniker. Huvudsyftet med deras studie var att använda djup förstärkningsinlärning (D-RL) för att realisera den komplexa koordinationen mellan ryggrad och ben i robotar.
"I ett D-RL-ramverk, att lära sig från grunden kan leda till bättre och robusta riktlinjer än att införliva mänsklig vägledning, " sa Bhattacharya. "Men, att lära sig från grunden innebär flera initiala misslyckanden innan en fungerande policy skapas. I det här arbetet, över 2 miljoner steg krävdes innan en aktiv och användbar policy erhölls."
Att utföra många försök direkt på en robots hårdvara kräver mycket tid och resurser. Forskarna bestämde sig därför för att simulera roboten och dess miljö i PyBullet, en pythonmodul som förbättrar Bullet physics-motorn med robotik och maskininlärningsfunktioner. I deras studie, de använde PyBullet för att utvärdera effekterna av aktivering av ryggradsleden på gränsprestandan hos Stoch 2, en 16-DOF fyrbäddsrobot.
"Vi tränade robotmodellen i den här miljön och observerade att inlärningsalgoritmen utförde en komplett träning på 4 timmar, när den exekveras i högst 10 miljoner steg, på en PC som drivs av en Intel Core i7 vid 3,5 GHz med 12 kärnor, och 32 GB RAM, "Bhattacharya sa. "Användningen av ett simuleringsramverk minskade tiden per träning och tog bort behovet av att experimentera med hårdvaran."
Använder PyBullet som ett lärande ramverk för sin robot, forskarna nådde mycket lovande resultat. Fynden de samlade in under simuleringar tyder på att den aktiva användningen av ryggraden gör, faktiskt, förbättra en robots steglängd och transportkostnader, samtidigt som den naturliga frekvensen reduceras till mer realistiska värden. I sista hand, Stoch 2 uppnådde en gränshastighet på 2,1 m/s, med ett maximalt antal Froude på 2.
Den här studien, övervakas av fyra fakultetsmedlemmar vid Indian Institute of Science:Shishir Kolathaya, Ashitava Ghosal, Bharadwaj Amrutur och Shalabh Bhatnagar, är en del av ett bredare projekt som heter Walking Robot. I framtiden, det skulle kunna inspirera andra forskare att använda samma simuleringsramverk för att förbättra deras robotars ryggradsbeteende och den därav följande rörelseprestanda.
"Vi fick koordinationen av ryggraden och benet genom ett D-RL-baserat ramverk, vilket ökade energieffektiviteten och hastigheten för den fyrfotade, ", sa Bhattacharya. "Det måste noteras att alla dessa beteenden erhölls från grunden utan någon förståelse för ryggradens mekanik. I vårt framtida arbete, vi planerar att distribuera det neurala nätverket på hårdvaran och exekvera den inlärda policyn direkt."
© 2019 Science X Network