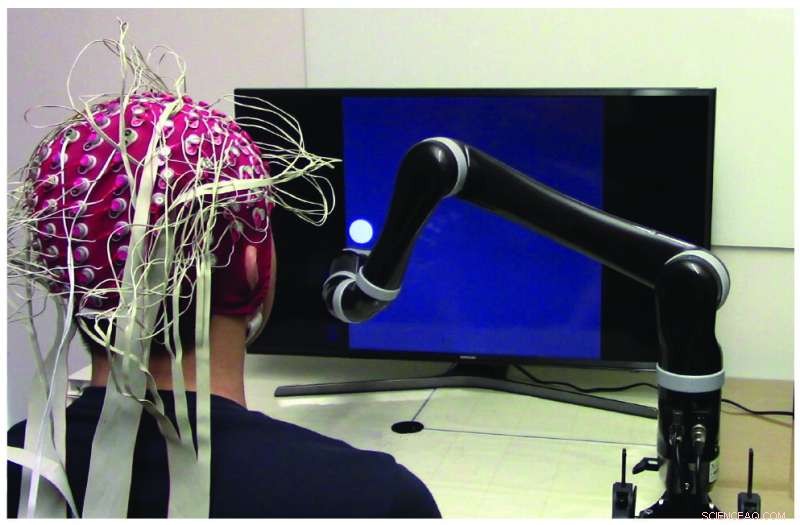
BCI-installation med en robotarm. Användare kontrollerade den kontinuerliga 2D-rörelsen av en robotarm för att spåra ett slumpmässigt rörligt mål på en datorskärm. Kredit:Edelman et al., Sci. Robot. 4, eaaw6844 (2019)
Ett team av forskare från Carnegie Mellon University, i samarbete med University of Minnesota, har gjort ett genombrott inom området för icke-invasiv robotstyrning av enheter. Med hjälp av ett icke-invasivt hjärn-datorgränssnitt (BCI), Forskare har utvecklat den första framgångsrika sinnestyrda robotarmen någonsin som uppvisar förmågan att kontinuerligt spåra och följa en datormarkör.
Att kunna styra robotenheter på ett icke-invasivt sätt med enbart tankar kommer att ha breda tillämpningar, i synnerhet gynnar livet för förlamade patienter och personer med rörelsestörningar.
BCI har visat sig uppnå bra prestanda för att styra robotenheter med endast de signaler som avkänns från hjärnimplantat. När robotenheter kan styras med hög precision, de kan användas för att utföra en mängd olika dagliga uppgifter. Tills nu, dock, BCI:er som är framgångsrika i att kontrollera robotarmar har använt invasiva hjärnimplantat. Dessa implantat kräver en betydande mängd medicinsk och kirurgisk expertis för att korrekt installera och fungera, för att inte tala om kostnader och potentiella risker för ämnen, och som sådan, deras användning har begränsats till ett fåtal kliniska fall.
En stor utmaning inom BCI-forskningen är att utveckla mindre invasiv eller till och med totalt icke-invasiv teknologi som skulle göra det möjligt för förlamade patienter att kontrollera sin miljö eller robotiska lemmar med sina egna "tankar". Sådan icke-invasiv BCI-teknik, om det lyckas, skulle ge så välbehövlig teknik till många patienter och till och med potentiellt till den allmänna befolkningen.
Dock, BCI som använder icke-invasiv extern avkänning, snarare än hjärnimplantat, ta emot "smutsigare" signaler, vilket leder till lägre upplösning och mindre exakt kontroll. Således, när man bara använder hjärnan för att styra en robotarm, en icke-invasiv BCI tål inte att använda implanterade enheter. Trots detta, BCI-forskare har gått framåt, deras blick på priset av en mindre eller icke-invasiv teknologi som kan hjälpa patienter överallt på en daglig basis.
Bin He, Förtroendeprofessor och institutionschef för biomedicinsk teknik vid Carnegie Mellon University, uppnår det målet, en nyckelupptäckt i taget.
"Det har skett stora framsteg inom tankestyrda robotenheter som använder hjärnimplantat. Det är utmärkt vetenskap, " säger han. "Men icke-invasiv är det ultimata målet. Framsteg inom neural avkodning och den praktiska användbarheten av icke-invasiv robotarmkontroll kommer att få stora konsekvenser för den eventuella utvecklingen av icke-invasiv neurorobotik."
Använda nya avkännings- och maskininlärningstekniker, Han och hans labb har kunnat komma åt signaler djupt inne i hjärnan, uppnå en hög upplösning av kontroll över en robotarm. Med icke-invasiv neuroimaging och ett nytt paradigm för kontinuerlig jakt, Han övervinner de bullriga EEG-signalerna som leder till att avsevärt förbättra EEG-baserad neural avkodning, och underlättar kontinuerlig 2D-robotstyrning i realtid.
Att använda en icke-invasiv BCI för att styra en robotarm som spårar en markör på en datorskärm, för första gången någonsin, Han har visat i mänskliga ämnen att en robotarm nu kan följa markören kontinuerligt. Medan robotarmar som kontrolleras av människor icke-invasivt tidigare hade följt en rörlig markör i ryckigt, diskreta rörelser – som om robotarmen försökte "komma ikapp" hjärnans kommandon – nu, armen följer markören i en jämn, kontinuerlig väg.
I en tidning publicerad i Vetenskapsrobotik , teamet etablerade ett nytt ramverk som adresserar och förbättrar "hjärnans" och "datorkomponenterna" i BCI genom att öka användarengagemang och utbildning, samt rumslig upplösning av icke-invasiva neurala data genom EEG-källavbildning.
Pappret, "Icke-invasiv neuroimaging förbättrar kontinuerlig neural spårning för robotstyrning av enheter, " visar att teamets unika tillvägagångssätt för att lösa detta problem inte förbättrade BCI-inlärningen med nästan 60 % för traditionella center-out-uppgifter, det förbättrade också kontinuerlig spårning av en datormarkör med över 500 %.
Tekniken har också applikationer som kan hjälpa en mängd olika människor, genom att erbjuda säker, icke-invasiv "mind control" av enheter som kan tillåta människor att interagera med och kontrollera sina miljöer. Tekniken har, hittills, testats i 68 arbetsföra människor (upp till 10 sessioner för varje ämne), inklusive virtuell enhetskontroll och styrning av en robotarm för kontinuerlig jakt. Tekniken är direkt tillämpbar på patienter, och teamet planerar att genomföra kliniska prövningar inom en snar framtid.
"Trots tekniska utmaningar med att använda icke-invasiva signaler, vi är fullt engagerade i att föra denna säkra och ekonomiska teknik till människor som kan dra nytta av den, " säger han. "Detta arbete representerar ett viktigt steg i icke-invasiva hjärn-dator-gränssnitt, en teknik som en dag kan bli en genomgripande hjälpteknik som hjälper alla, som smartphones."