MARTY, den autonoma drivande DeLorean. Kredit:Jonathan Goh
När DeLorean rullade till stopp och molnet av däckrök försvann, Jon Goh kikade ut ur fönstret på passagerarsidan för att se dussintals samlade åskådare som hejade och high-fiving det lyckade testet.
Folkmassan, och förväntan, hade byggt under hela eftermiddagen, medan goh, en nyligen genomförd maskinteknik Ph.D. examen från Stanford, hade ritat ut en kilometerlång hinderbana i trafikkoner vid Thunderhill Raceway i norra Kalifornien. Solen gick ner snabbt, men Goh och hans co-pilot, en annan student som heter Tushar Goel, kunde inte vänta till morgonen för att ta ett skott på den krokiga banan. Förutom, MARTY, föraren, behövde inte se spåret – det behövdes bara GPS-koordinater och algoritmerna på Gohs bärbara dator för att kartlägga dess väg.
MARTY är en DeLorean från 1981 som Goh och hans kollegor vid Stanfords Dynamic Design Lab omvandlade till en helelektrisk, autonom drivbil. Fyra år sedan, MARTY drev - stilen att köra där bilen rör sig framåt trots att den är spetsad i sidled - genom sina första munkar med omänsklig precision. Sedan dess, Goh och teamet har varit upptagna med att svetsa och koda för att förbereda MARTY att tillämpa dessa grundläggande drifting-färdigheter på en intensiv körkurs, och otroligt nog hade allt fungerat perfekt. MARTY skrek sig igenom svängar och snabba sicksackar på bara några minuter, sparkar upp rök och gummibitar, utan att hacka en enda kon längs banan.
När jublet fortsatte, tillfredsställelsen sköljde över Goh. Att slutföra "MARTYkhana"-kursen på första försöket var fantastiskt, men han visste att de unika data som samlats in från körningen kunde förändra kapaciteten hos autonoma körsystem som finns i bilar idag.
Att gå över gränserna för att få kontroll
MARTYkhana – ett riff på "gymkhana" autocrossracingformat som betraktas som mästertestet på en förares förmåga – är knappast ett jippo. Att bedriva forskning inom höghastighet, komplicerade körförhållanden som detta är ett bröd och smör till Dynamic Design Lab, där maskiningenjören Chris Gerdes och hans elever styr autonoma bilar in i utmanande körsituationer som bara de bästa mänskliga förarna kan hantera på ett tillförlitligt sätt. Kördatorer mäter bilens svar över dussintals körningar, och ingenjörerna översätter fordonsdynamiken till programvara som en dag kan hjälpa din bil att snabbt undvika en fotgängare som hoppar in på vägen.
De flesta automatiserade fordon på vägen har utformats för att hantera enklare fall av körning, som att hålla sig i ett körfält eller att hålla rätt avstånd till andra bilar.
"Vi försöker utveckla automatiserade fordon som kan hantera nödmanövrar eller hala ytor som is eller snö, ", sa Gerdes. "Vi skulle vilja utveckla automatiserade fordon som kan använda all friktionen mellan däcket och vägen för att få bilen ur vägen. Vi vill att bilen ska kunna undvika alla olyckor som kan undvikas inom fysikens lagar."
Att träna en autonom bil att driva är en förvånansvärt bra metod för att testa en bils förmåga att köra undvikande. Under typiska förhållanden, en förare riktar bilen dit de vill gå och använder gaspedalen och bromspedalerna för att kontrollera hastigheten. När man driver, vare sig det är avsiktligt eller inte, detta går ut genom fönstret.
"Plötsligt pekar bilen i en helt annan riktning än vart den ska. Din ratt styr hastigheten, gasreglaget påverkar rotationen, och bromsarna kan påverka hur snabbt du ändrar riktning, " Sa Goh. "Du måste förstå hur man använder dessa välbekanta ingångar på ett helt annat sätt för att styra bilen, och de flesta förare är helt enkelt inte så bra på att hantera bilen när den blir så här instabil."

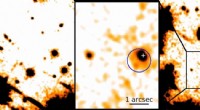
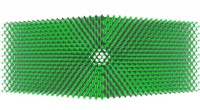
Överlagrade ramar, med 0,5 sekunders intervall, från en overheadvideo av en framgångsrik, helt autonomt "Figur 8" drivande experiment på MARTY. Detta experiment utförs i hastigheter på 50 km/h, och övergångar genom +/- 40 graders sidglidning på ungefär en sekund. Kredit:Jonathan Goh
Kommersiella fordon är utrustade med elektroniska stabilitetskontrollsystem som försöker förhindra bilar från att komma in i dessa instabila tillstånd, men det är här driftarna trivs. De utnyttjar denna instabilitet för att manövrera bilen på mer smidiga och exakta sätt som gör att de kan svida sig genom en smal hinderbana utan att så mycket som beta av barriärerna.
Genom att studera vanorna hos yrkesförare och testa samma kontrollmanövrar i MARTY, Stanford -teamet har gjort det möjligt för bilen att använda ett större intervall av sina fysiska gränser för att bibehålla stabiliteten genom ett bredare spektrum av förhållanden, och den inblandade matematiken kan tillåta autonoma system att manövrera med smidigheten hos en driftracer i nödsituationer.
"Genom att driva, vi kan komma till extrema exempel på körfysik som vi inte skulle annars, " Sa Goh. "Om vi kan erövra hur man säkert kontrollerar bilen i de mest stabila och de mest instabila scenarierna, det blir lättare att koppla ihop alla prickar däremellan."
En grundad omvandling
När Gerdes och Goh gav sig ut för att bygga MARTY-som står för Multiple Actuator Research Test-säng för Yaw-kontroll-visste de att de ville ha en bil med bakhjulsdrift som skulle möjliggöra frihet för oändliga uppgraderingar, och de ville att det skulle ha en viss cool faktor.
"Så som vi ser det, om du ska bygga ett forskningsfordon, varför inte göra det med någon stil? "Gerdes säger gärna, nickar till den klassiska linjen från Tillbaka till framtiden.
En DeLorean bockade alla dessa rutor. Om du skulle titta under MARTYs ikoniska skal i rostfritt stål, du skulle hitta väldigt lite DeLorean vid det här laget. Den underdrivna drivlinan har ersatts av kraftiga batterier och elmotorer utvecklade av Renovo. Den ursprungliga upphängningen var för squishy för att hålla en anständig drift, så laget designade och tillverkade komponenter som kunde klara uppgiften. Mekaniska reglage för styrning, bromsning och strypning ersattes av elektroniska system. Det finns en rullbur.
Ett par GPS-antenner prickar taket och spårar bilens position inom en tum, och hela operationen körs på datorer instoppade bakom sätena. Gå in i kurslayouten, MARTY beräknar den smidigaste avdriftsrutten som möjligt på några sekunder. Det tar mycket längre tid att sätta upp trafikkonerna.
Kör som en människa
Den första MARTY-relaterade tidskriften publicerades nyligen och definierar systemet som bilen använder för att styra sin vinkel och position exakt under grundläggande driftförhållanden. Controllerdesignen var mycket mer okomplicerad än förväntat, Goh sa, och är öppen tillgång för att låta andra upprepa tillvägagångssättet.
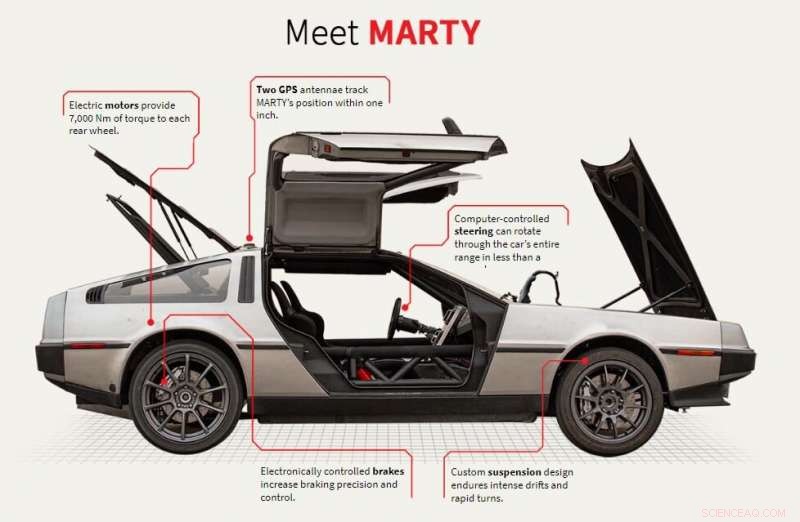
Kredit:Infographic av Yvonne Tang; originalfoto av Jonathan Goh
Andra papper på gång kommer att beskriva de tekniker som teamet utvecklat som använder bilens hela styrområde, vilket gör det möjligt att slutföra mer komplicerade rutter, som MARTYkhana. Och teamet fortsätter att experimentera med hur införande av bromsar fram och bak kan öppna ännu fler funktioner för det autonoma systemet. Sammanlagt, detta arbete gör att MARTY kan göra skarpare svängar i följd ännu snabbare, vilket ytterligare hjälper till att träna den för att navigera i extrema förhållanden.
"Resultaten hittills är ganska enastående, ", sa Gerdes. "Stabilitetskontrollsystemen i moderna bilar begränsar förarens kontroll till ett mycket snävt område av bilens potential. Med MARTY har vi kunnat bredare definiera intervallet av förhållanden under vilka vi kan arbeta säkert, och vi har förmågan att stabilisera bilen i dessa instabila förhållanden."
Drifting är lika mycket en konstform som en teknisk skicklighet, en detalj Gerdes har betonat sedan starten. Det är därför han kommer att spöka över hur imponerad han är över att hans elever har programmerat MARTY att glida i nivå med yrkesförare.
"Det är verkligen imponerande hur snabb bilen kan göra dessa övergångar och även hur exakt den kan vara, sa Fredric Aasbo, världsmästaren i Formeldrift 2015. "För att det är tricket som förare. Det är vad vi alla försöker lista ut."