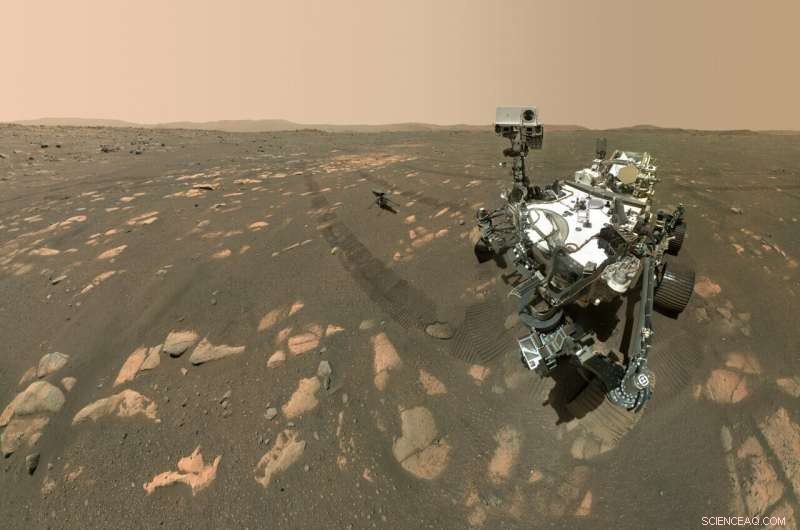
NASA:s Perseverance Mars-rover tog en selfie med Ingenuity-helikoptern, ses här cirka 13 fot (3,9 meter) från rovern. Den här bilden togs av WASTON-kameran på roverns robotarm den 6 april, 2021, den 46:e marsdagen, eller sol, av uppdraget. Kredit:NASA/JPL-Caltech/MSSS
Har du någonsin undrat hur Mars-rovers tar en selfie? Färgvideo från NASA:s Perseverance visar hur rovern fångade den historiska 6 april, 2021, bild av sig själv bredvid Ingenuity Mars Helicopter. Som en bonus, roverns inträde, härkomst, och landningsmikrofonen fångade ljudet av armens motorer som surrade under processen.
Selfies tillåter ingenjörer att kontrollera slitage på rover. Men de inspirerar också en ny generation rymdentusiaster:Många roverteammedlemmar kan citera en favoritbild som väckte deras intresse för NASA.
"Jag hamnade i det här för att jag såg en bild från Sojourner, NASA:s första Mars-rover, sa Vandi Verma, Perseverances chefsingenjör för robotoperationer vid NASA:s Jet Propulsion Laboratory i södra Kalifornien. Verma arbetade som förare för byråns Opportunity och Curiosity rovers, och hon hjälpte till att skapa Curiositys första selfie, snappade den 31 oktober, 2012. "När vi tog den första selfien, vi insåg inte att dessa skulle bli så ikoniska och rutinmässiga, " Hon sa
Video från en av Perseverances navigeringskameror visar roverns robotarm vrida och manövrera för att ta de 62 bilderna som komponerar bilden. Vad den inte fångar är hur mycket arbete som lagts ner på att få den här första selfien att hända. Här är en närmare titt.
Lagarbete
Perseverances selfie kom ihop med hjälp av en kärngrupp på ett dussintal personer, inklusive roverförare, ingenjörer som körde tester på JPL, och kameraoperationsingenjörer som utvecklade kamerasekvensen, bearbetade bilderna, och sydde ihop dem. Det tog ungefär en vecka att rita ut alla de individuella kommandon som krävdes.
Alla arbetade på "Mars-tid" (en dag på den röda planeten är 37 minuter längre än på jorden), vilket ofta innebär att vara vaken mitt i natten och ta igen sömnen under dagen. Dessa teammedlemmar missade ibland den sömnen bara för att få selfien gjort.
JPL arbetade med Malin Space Science Systems (MSSS) i San Diego, som byggde och styr kameran som ansvarar för selfien. Kallas WATSON (Wide Angle Topographic Sensor for Operations and Engineering), kameran är främst designad för att ta närbilder av stenstrukturer, inte vidvinkelbilder. Eftersom varje WATSON-bild bara täcker en liten del av en scen, ingenjörer var tvungna att beordra rovern att ta dussintals individuella bilder för att producera selfien.
"Det som tog mest uppmärksamhet var att få Ingenuity på rätt plats i selfien, sa Mike Ravine, Advanced Projects Manager på MSSS. "Med tanke på hur liten den är, Jag tyckte att vi gjorde ett ganska bra jobb."

Denna datorsimulering visar NASA:s Perseverance Mars-rover som tar sin första selfie, den 6 april, 2021. Synvinkeln från roverns WATSON-kamera ingår för att visa hur var och en av de 62 bilderna togs innan de skickades till jorden och sattes ihop till selfien. Kredit:NASA/JPL-Caltech
När bilder kommer ner från Mars, MSSS bildbehandlingsingenjörer började sitt arbete. De börjar med att rensa upp eventuella fläckar orsakade av damm som lagt sig på kamerans ljusdetektor. Sedan, de sätter ihop de individuella bildramarna till en mosaik och jämnar ut sina sömmar med hjälp av programvara. Till sist, en ingenjör förvränger och beskär mosaiken så att den ser mer ut som ett vanligt kamerafoto som allmänheten är van vid att se.
Datorsimuleringar
Som Curiosity-rover (denna svartvita video från mars 2020 visar hur den tar en selfie), Perseverance har ett roterande torn i änden av sin robotarm. Tillsammans med andra vetenskapliga instrument, tornet inkluderar WATSON-kameran, som förblir fokuserad på rovern under selfies samtidigt som den vinklas för att fånga en del av scenen. Armen fungerar som en selfiestick, kvarstår precis utanför ram i slutprodukten.
Att befalla Perseverance att filma sin selfie-stick i aktion är mycket mer utmanande än med Curiosity. Där Curiositys torn mäter 22 tum (55 centimeter) i diameter, Perseverances torn är mycket större, mäter 30 tum (75 centimeter) i diameter. Det är som att vifta med något med diametern på ett landsvägscykelhjul bara centimeter framför Perseverances mast, roverns "huvud".
JPL skapade programvara för att säkerställa att armen inte kolliderar med rover. Varje gång en kollision upptäcks i simuleringar på jorden, ingenjörsteamet justerar armbanan; processen upprepas dussintals gånger för att bekräfta att armrörelsen är säker. Den sista kommandosekvensen får robotarmen "så nära som vi kunde komma roverns kropp utan att röra den, sa Verma.
De kör andra simuleringar för att säkerställa att, säga, Ingenuity-helikoptern placeras på lämpligt sätt i den sista selfien eller så kan mikrofonen fånga upp ljud från robotarmens motorer.
Ljudet av selfies
Tillsammans med dess inträde, härkomst, och landningsmikrofon, Perseverance har en mikrofon i sitt SuperCam-instrument. Mikrofonerna markerar en första för NASA:s Mars-rymdfarkost, och ljud lovar att bli ett viktigt nytt verktyg för roveringenjörer under de kommande åren. Bland annat används det kan ge viktig information om huruvida något fungerar som det ska. Förr, ingenjörer skulle få nöja sig med att lyssna på en testrover på jorden.
"Det är som din bil:Även om du inte är mekaniker, ibland hör du ett problem innan du inser att något är fel, sa Verma.
Även om de inte har hört något om hittills, de snurrande motorerna låter förvånansvärt musikaliskt när de ekar genom roverns chassi.
Mer om uppdraget
Ett nyckelmål för Perseverances uppdrag på Mars är astrobiologi, inklusive sökandet efter tecken på forntida mikrobiellt liv. Rovern kommer att karakterisera planetens geologi och tidigare klimat, bana väg för mänsklig utforskning av den röda planeten, och bli det första uppdraget att samla in och cachelagra Martian rock och regolit (bruten sten och damm).
Efterföljande NASA-uppdrag, i samarbete med ESA (European Space Agency), skulle skicka rymdfarkoster till Mars för att samla in dessa förseglade prover från ytan och returnera dem till jorden för djupgående analys.