Illustration av DeployBots som distribuerar sig själva på en planet för utforskning av rymden. Kredit:Wang et al. ©2017 Royal Society of Chemistry
(Phys.org)—Forskare har byggt den första roboten gjord av mjuk, utplacerbara material som kan röra sig självt utan användning av motorer eller några ytterligare mekaniska komponenter. Roboten "går" när en elektrisk ström appliceras på metalltrådar med formminne som är inbäddade i dess ram:strömmen värmer ledningarna, får robotens flexibla segment att dra ihop sig och böjas. Att sekventiellt kontrollera strömmen till olika segment på olika sätt resulterar i olika gånggångar.
Forskarna förväntar sig att robotens förmåga att enkelt kunna användas, tillsammans med dess låga massa, låg kostnad, lastbärande förmåga, Kompakt storlek, och möjligheten att konfigureras om till olika former kan göra den användbar för applikationer som rymduppdrag, utforskning av havsbotten, och hushållsföremål.
Forskarna, Wei Wang et al., vid Seoul National University och Sungkyunkwan University, har publicerat en artikel om den nya roboten och andra typer av utplacerbara strukturer som kan byggas med samma metod i ett färskt nummer av Material horisonter .
"Den största fördelen med denna modulära robot är robusthet i olika miljöer på grund av brist på mekaniska system som motorer och växlar, " berättade medförfattaren Sung-Hoon Ahn vid Seoul National University Phys.org . "Således, problem som motorbaserade robotar står inför, såsom tätning och smörjning av mekaniska system i vatten- eller rymdmiljöer, är inte ett problem för det smarta ställdonet."
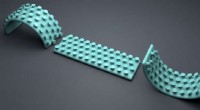
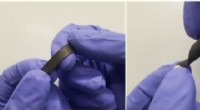
Roboten, som forskarna kallar DeployBot, är sammansatt av åtta moduler:fyra för kroppen och en för vart och ett av de fyra benen. I sitt vikta tillstånd, modulerna ligger platt, och efter att de är utplacerade dyker de upp i ungefär en kvadratisk form. Modulerna är gjorda av både styva och flexibla material och innehåller inbäddade magneter som kopplar ihop och låser flera moduler. En formminneslegeringstråd som löper genom den fyrkantiga ramen på varje modul ansvarar för att installera och vika modulerna, som tar flera sekunder men kan göras upprepade gånger.
Forskarna visade att DeployBot kan gå med två olika gångarter. Den första är en böljande gång, vilket liknar hur en tummask kryper över en yta. Att göra detta, en strömsekvens i fyra steg appliceras för att generera en aktiveringsvåg genom robotens kropp, från framsidan till baksidan. Obalansen i friktionskontakt med marken mellan fram- och bakbenen gör att roboten drar upp sina bakben samtidigt som de håller frambenen på plats, vilket resulterar i rörelse framåt.
DeployBot kan också gå med en ambulerande gång, liknande hur ett fyrbent djur går. Dock, denna gång kräver att roboten stöder hela sin vikt på endast två ben, och robotens ben har inte tillräckligt med lyftkraft för att göra detta – åtminstone, inte på land. Men genom att placera roboten under vatten, på sandytan av en vattentank, forskarna utnyttjade Archimedes princip som minskar kraften som krävs för att lyfta roboten.
För närvarande rör sig roboten mycket långsamt, med en hastighet av lite över 2 meter i timmen. Roboten kan också vända, men återigen i långsam takt, kräver 21 steg för att vända 90 grader. Även om roboten inte är snabb, det kan fortfarande fungera som ett användbart verktyg för applikationer där hastigheten inte är viktig.
Går framåt, forskarna förväntar sig att teknikerna som används här också kan användas för att göra moduler av olika former, leder till ett större utbud av robotdesigner och funktioner. Forskarna noterade också att olika metoder för att flytta roboten förutom en applicerad ström kunde undersökas - till exempel, med pneumatisk aktivering, magnetiska fält, eller optiska krafter. De föreslår också att samma tillvägagångssätt som används här skulle kunna användas för att tillverka strukturer i mikroskala och nanoskala, vilket skulle öppna upp ett nytt utbud av applikationer.
© 2017 Phys.org