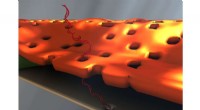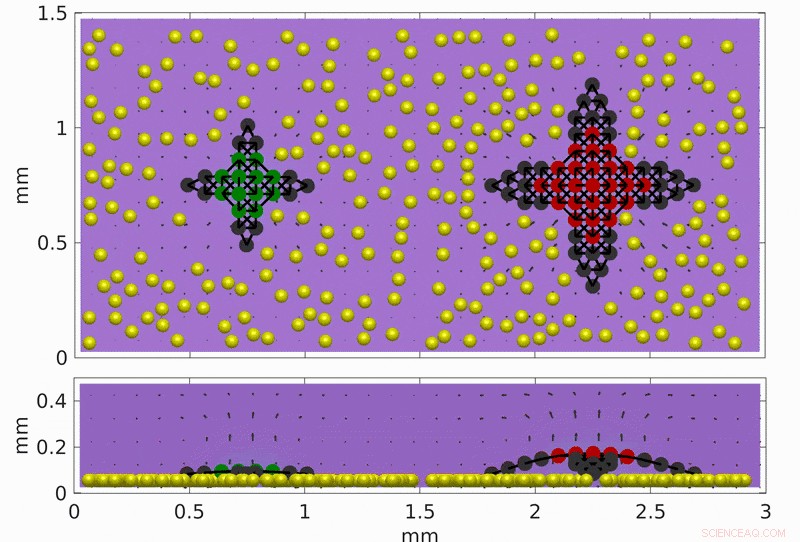
Ytarean för aktiva platser på den röda krabban är dubbelt så stor som den gröna grabben; därför, den röda krabban drar bort partiklar från gröna konkurrenter genom att generera starkare inåtgående flöden (markerade med svarta pilar). Kredit:Abhrajit Laskar/Anna Balazs
Samarbete och konkurrens är grundläggande instinkter bland biologiska arter, från de enklaste encelliga organismerna till reptiler, fiskar och primater, liksom människor. Detta dynamiska beteende – resultatet av miljontals år av evolution – är svårt att replikera i syntetiska system. Dock, kemiska ingenjörer vid University of Pittsburgh Swanson School of Engineering har återskapat dessa svar i en miljö av mikroskopiska partiklar, lakan, och katalysatorer, effektivt efterliknar reaktioner av utfodring, stridande, och flyr.
Deras forskning, "Samarbete och slutförande mellan aktiva ark för självgående partiklar, "publicerades den här veckan i Förfaranden från National Academy of Sciences . Huvudutredare är Anna C. Balazs, John A. Swanson ordförande och framstående professor i kemi- och petroleumteknik vid Swanson School. Huvudförfattare är Abhrajit Laskar, och medförfattare är Oleg E. Shklyaev, båda postdoktorala.
Som en upptakt till detta arbete, Dr Balazs et al använde beräkningsmodellering för att designa kemiskt aktiva ark som kunde slå in, klaffa och krypa i en vätskefylld mikrokammare, utnyttja potentialen att skapa flexibla eller "squishy" robotar för flytande miljöer. För PNAS-artikeln, forskarna konstruerade fluidsystem som formar de katalysatorbelagda arken till en form som liknar en krabba med fyra "klor, " skapar rovdjuret som kemiskt kan "jaga" sitt partikelbyte.
"När vi utvecklar framtida robotik och smarta enheter, det är viktigt att förstå gränserna för att imitera biologiska funktioner i mänskligt tillverkade maskiner. Det är också viktigt att förstå om artificiella system kan samarbeta eller konkurrera om resurser, "Dr. Balazs förklarade. "Om vi kan replikera detta ömsesidiga beroende, vi kan hjälpa till att skapa grunden för robotar eller andra enheter för att arbeta tillsammans mot ett gemensamt mål. "
För att påverka detta beteende, Balazs och hennes medarbetare använde katalysatorn på arken för att omvandla reaktanter till produkter i en mikrokammare. Denna reaktion skapar variationer i den kemiska sammansättningen och vätskedensiteten, som ändrar de tvådimensionella arken till 3-D "krabbor" och driver både krabbor och partiklarna i vätskan. När krabbarna genererar kemiska gradienter i ett område, partiklarna svarar genom att försöka "fly" från detta område, bildar ett starkt ömsesidigt beroende system.
Detta ömsesidiga beroende påverkade också miljön när en andra krabba sattes till vätskan - när reaktanten väl introducerades, de två krabborna härmade samarbete för att "dela" partiklar. Dock, om en större krabba introducerades, den skulle konkurrera med de mindre formerna för att fånga alla partiklar för sig själv.
"I vissa fall, den stora krabban kan inte fånga de små partiklarna, men när vi lägger till fler krabbor verkar de samarbeta som en flock vargar, "Dr Shklyaev förklarar." Likaså, när ett ännu större rovdjur kommer in i mikrokammaren, "hungern" den genererar med en större katalytisk yta kommer att dominera beteendet hos de mindre predatorbladen."
Dr. Laskar säger att enkelheten med detta system är att den enda programmeringen som är involverad är införandet av det kemiska reagenset i systemet.
"När vi väl lade till en reaktant i mikrokammaren, alla biomimetiska beteenden inträffade spontant, " sa han. "Vi kan sedan skräddarsy i vilken utsträckning partiklarna svarar på kemiska gradienter, eftersom olika partiklar kommer att reagera på olika sätt. Så att ändra egenskapen för ens en typ av objekt förändrar hela systemets ömsesidiga beroende."
Enligt Dr Balazs, de nya fynden indikerar förmågan att kontrollera aktivitet inom mikrokammaren i rum och tid, därigenom gör det möjligt för arken att svara på olika kommandon endast genom att ändra reaktanterna som tillsätts till lösningen.
"Våra beräkningar avslöjar förmågan att styra mikroskopiska föremål för att utföra specifika funktioner, som att transportera celler eller bygga komplexa strukturer, " sa hon. "Dessa designregler har potential att diversifiera funktionaliteten hos mikrofluidiska enheter, så att de kan utföra betydligt mer komplexa uppgifter."