Gripper Square. Harvard -forskare har utvecklat en plattform för att skapa mjuka robotar med inbyggda sensorer som kan känna rörelse, tryck, Rör, och temperatur. Upphovsman:Ryan L. Truby /Harvard University
Forskare vid Harvard University har byggt mjuka robotar inspirerade av naturen som kan krypa, simma, ta tag i känsliga föremål och till och med hjälpa ett hjärta som slår men ingen av dessa enheter har kunnat känna och reagera på omvärlden.
Det är på väg att förändras.
Inspirerad av våra kroppars sensoriska förmågor, forskare vid Harvard John A. Paulson School of Engineering and Applied Sciences och Wyss Institute for Biologically Inspired Engineering har utvecklat en plattform för att skapa mjuka robotar med inbyggda sensorer som kan känna rörelse, tryck, Rör, och jämn temperatur.
Forskningen publiceras i Avancerade material .
"Vår forskning representerar ett grundläggande framsteg inom mjuk robotik, "sa Ryan Truby, första författaren till tidningen och den senaste doktoranden. examen vid SEAS. "Vår tillverkningsplattform gör det möjligt att enkelt integrera komplexa avkänningsmotiv i mjuka robotsystem."
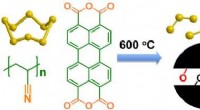
Att integrera sensorer i mjuka robotar har delvis varit svårt eftersom de flesta sensorer, som de som används i traditionell elektronik, är styva. För att hantera denna utmaning, forskarna utvecklade ett organiskt joniskt vätskebaserat ledande bläck som kan 3D-skrivas ut i de mjuka elastomermatriser som består av de flesta mjuka robotar.
"Hittills, de flesta integrerade sensor-/ställdonssystem som används inom mjuk robotik har varit ganska rudimentära, "sa Michael Wehner, tidigare postdoktor vid SEAS och medförfattare till tidningen. "Genom att direkt skriva ut joniska vätskesensorer inom dessa mjuka system, vi öppnar nya vägar för enhetsdesign och tillverkning som i slutändan kommer att möjliggöra sann sluten kontroll av mjuka robotar. "
Wehner är nu biträdande professor vid University of California, Santa Cruz.
För att tillverka enheten, forskarna förlitade sig på en etablerad 3D -tryckteknik som utvecklats i laboratoriet av Jennifer Lewis, Hansjorg Wyss, professor i biologiskt inspirerad teknik vid SEAS och ledare vid Wyss Institute. Tekniken - känd som inbäddad 3D -utskrift - integrerar sömlöst och snabbt flera funktioner och material i en enda mjuk kropp.
"Detta arbete representerar det senaste exemplet på de möjliggörande möjligheter som inbäddad 3D -utskrift ger - en teknik som föregångare från vårt labb, "sa Lewis.
"Funktionen och designflexibiliteten för denna metod är oöverträffad, "sa Truby." Detta nya bläck i kombination med vår inbäddade 3D -utskriftsprocess gör att vi kan kombinera både mjuk avkänning och aktivering i ett integrerat mjukt robotsystem. "
För att testa sensorerna, laget tryckte ut en mjuk robotgripare bestående av tre mjuka fingrar eller ställdon. Forskarna testade griparens förmåga att känna av inflationstryck, krökning, Kontakt, och temperatur. De inbäddade flera kontaktsensorer, så griparen kunde känna ljus och djupa beröringar.
"Mjuk robotik begränsas vanligtvis av konventionella gjutningstekniker som begränsar geometriska val, eller, vid kommersiell 3D -utskrift, materialval som hindrar designval, "sa Robert Wood, Charles River professor i teknik och tillämpad vetenskap vid SEAS, Kärnfakultetsmedlem vid Wyss Institute, och medförfattare till tidningen. "Teknikerna som utvecklats i Lewis Lab har möjlighet att revolutionera hur robotar skapas - gå bort från sekventiella processer och skapa komplexa och monolitiska robotar med inbyggda sensorer och ställdon."
Nästa, forskarna hoppas kunna utnyttja kraften i maskininlärning för att träna dessa enheter för att förstå objekt av varierande storlek, form, yttextur, och temperatur.