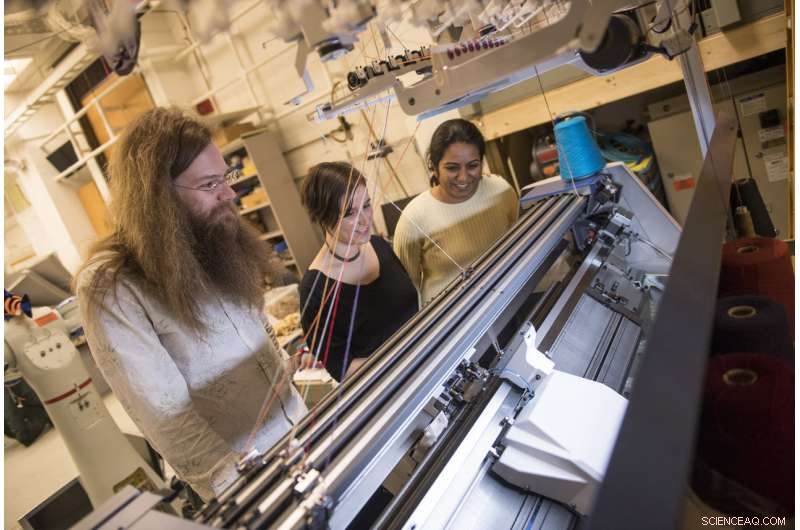
James McCann, biträdande professor i robotik, och Carnegie Mellon doktorander Lea Albaugh och Vidya Narayanan kontrollerar en datorstyrd stickmaskin. Deras system översätter 3D-former till söm-för-söm-instruktioner så att maskinen automatiskt kan producera dem. Kredit:Carnegie Mellon University/Michael Henninger
Carnegie Mellon Universitys datavetare har utvecklat ett system som kan översätta en mängd olika 3D-former till söm-för-söm-instruktioner som gör det möjligt för en datorstyrd stickmaskin att automatiskt producera dessa former.
Forskare vid Carnegie Mellon Textiles Lab har använt systemet för att producera en mängd olika plyschleksaker och plagg. Vad mer, James McCann, biträdande professor vid Robotics Institute och ledare för labbet, sade att denna förmåga att generera stickinstruktioner utan behov av mänsklig expertis skulle kunna göra on-demand maskinstickning möjlig.
McCanns vision är att använda samma maskiner som rutinmässigt vevar fram tusentals stickade mössor, handskar och andra kläder för att producera skräddarsydda bitar en i taget eller i små mängder. Handskar, till exempel, kan utformas för att passa en kunds händer exakt. Atletiska skoöverdelar, tröjor och hattar kan ha unika färgmönster eller prydnad.
"Stickmaskiner kan bli lika lätta att använda som 3D-skrivare, " sa McCann.
Det står i skarp kontrast till stickningens värld idag.
"Nu, om du kör ett golv med stickmaskiner, du har också en avdelning för ingenjörer, "sa McCann, som noterade att plaggdesigners sällan har den specialkompetens som krävs för att programmera maskinerna. "Det är inte ett hållbart sätt att göra enstaka skräddarsydda delar.
I deras senaste arbete, kommer att presenteras i sommar på SIGGRAPH 2018, konferensen om datorgrafik och interaktiva tekniker i Vancouver, Kanada, McCann och hans kollegor utvecklade en metod för att omvandla 3D-maskor - en vanlig metod för att modellera 3D-former - till instruktioner för V-bäddsstickmaskiner.

Denna plysch, uppstoppad kanin producerades automatiskt från ett 3D-nät med hjälp av ett Carnegie Mellon University-system för att automatiskt översätta formen till stick-för-stygn-instruktioner för en stickmaskin. Kredit:Carnegie Mellon University/Michael Henninger
Dessa mycket använda maskiner manipulerar öglor av garn med krokformade nålar, som ligger i parallella nålbäddar vinklade mot varandra i en inverterad V-form. Maskinerna är mycket kapabla, men är begränsade i jämförelse med handstickning, sa Vidya Narayanan, en Ph.D. student i datavetenskap.
CMU-algoritmen tar hänsyn till dessa begränsningar, Hon sa, ta fram instruktioner för mönster som fungerar inom maskinens gränser och minskar risken för garnbrott eller fastnar.
Ett front-end designsystem som detta är vanligt vid 3D-utskrift och i datordrivna maskinbutiker, men inte i stickvärlden, Sa McCann. Likaså, 3D-utskrifter och maskinverkstäder använder vanliga språk och filformat för att köra sin utrustning, medan stickmaskiner använder en mängd olika språk och verktyg som är specifika för vissa märken av stickmaskiner.McCann ledde ett tidigare försök att skapa ett gemensamt stickformat, kallas Knitout, som kan implementeras med alla märken av stickmaskiner.
Ytterligare arbete krävs för att göra on-demand stickning till verklighet. Till exempel, systemet producerar nu bara slät stickad duk, utan de mönstrade sömmarna som kan göra stickade plagg distinkt. Stickningsekosystemet behöver också byggas ut, med designverktyg som fungerar med vilken maskin som helst. Men framstegen kan vara snabba vid denna tidpunkt, sa McCann.
"Stickvaran är redan riktigt bra, " förklarade han. "Det är programvaran som behöver en liten push. Och mjukvara kan förbättras snabbt eftersom vi kan iterera så mycket snabbare."
Förutom McCann och Narayanan, forskargruppen inkluderade Jessica Hodgins, professor i datavetenskap och robotik; Lea Albaugh, en Ph.D. student i Human-Computer Interaction Institute; och Stelian Coros, en fakultetsmedlem vid ETH Zürich och en adjungerad professor i robotik vid CMU.
Forskningsdokumentet, tillsammans med en video, är tillgänglig på GitHub.