En fyrbent robot inspirerades av en katts rörelse. Kredit:Foto/Daiming Yang
Från att glida och gå till att flyga eller simma, djur kan röra sig och interagera med sin miljö relativt lätt. Dock, att bygga en robot med samma kapacitet är mycket svårare.
"Robotiker tittar på varelser i den naturliga världen med en hel del avundsjuka, " sa Satyandra "S.K." Gupta, som innehar en Smith International Professorship in Mechanical Engineering vid USC Viterbi School of Engineering.
"Att hämta inspiration från naturen ger nya möjligheter att förverkliga nya robotar. Som sådan, bioinspirerad robotik har vuxit fram som en viktig specialisering inom robotikområdet, sa Gupta, biträdande avdelningsordförande för avdelningen för flyg- och rymdteknik och chef för Center for Advanced Manufacturing.
Genom att efterlikna naturliga rörelser, dessa varelseliknande robotar kan gå dit traditionella robotar inte kan, som den svåra terrängen på katastrofplatser. De kan användas för att rädda liv, förbättra säkerheten eller utforska avlägsna platser. Dessutom, anpassning av biologiska attribut kan leda till mer robusta eller energieffektiva robotar.
Robotar som härmar djur:nya möjligheter
I "Biologiskt inspirerad robotik, "en grundutbildning undervisad av Gupta, studenter tittade på naturen för nya möjligheter inom robotdesign. Efter att ha lärt sig om grunderna för traditionell robotik och rollen av biologiskt inspirerad design, eleverna fick i uppdrag att bygga och programmera sin alldeles egna robot utifrån djurens rörelser.
Kredit:Ashleen Knutsen
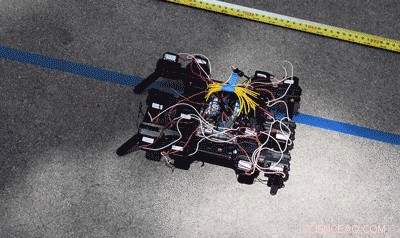
Daiming Yang, Chenchen Huang och Shijing Lu valde att bygga en fyrbent robot som efterliknar en katts rörelse.
Till skillnad från hundar eller hästar, katter går med frambenen böjda framåt i stället för bakåt, som kan skapa "singulariteter" i robotisk rörelseanalys, sa Yang.
Ett annat team valde att skapa en robot som gick i sidled som en krabba.
"Vårt team försökte fånga den passivt stabila dynamiken [serie av fall] som krabbor gör när de går långsamt, sa Pamela Denny, vars lagkamrater inkluderade Mary Bessell och Yan Zhang. "Den svåraste uppgiften var att sätta ihop roboten och ta bort all friktion från lederna. Detta var en mycket detaljerad och komplex uppgift eftersom det fanns 12 leder att sätta, anpassa och justera."

Studenter tittar på de fyrbenta, kattliknande robot tar sig nerför banan. Kredit:Satyandra "S.K." Gupta
I slutet av april, de nio teamen presenterade sina projekt för klassen och visade sin robots unika förmåga. Att gå, kryper eller sidsteg, varje robot tog sig nerför ett spår 30 gånger längre än kroppens längd, betecknar framgången för en terminslång insats.
"Vårt team var så glada över att skapa en krabba som faktiskt fungerade, Denny sa. "Det var väldigt roligt och jag rekommenderar starkt klassen."