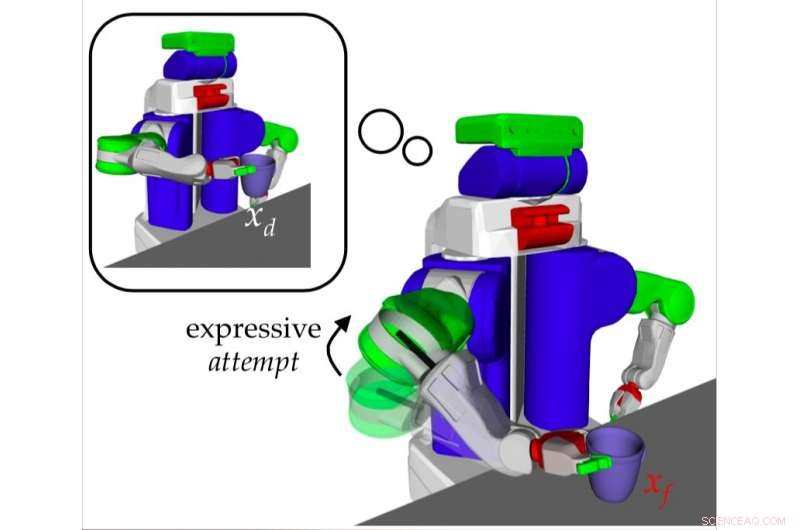
Metoden som utarbetats av forskarna genererar en försöksrörelse som är avsedd att likna framgångsrik utförande (t.ex. flytta sluteffektorn från xf till xd) samtidigt som man följer begränsningarna för robotens begränsningar. I det här exemplet, lyfter på armbågen för att meddela att den försöker lyfta koppen, men koppen är för tung för att kunna lyftas av den. Kredit:Kwon, Huang och Dragan.
Forskare vid Cornell University och University of California, Berkeley, har utvecklat en metod för att automatiskt generera rörelser med vilka robotar kan uttrycka sin oförmåga att utföra en given uppgift. Dessa genererade rörelser kommunicerar tydligt både vilken uppgift roboten inte kan slutföra och varför den inte kan slutföra den.
"När du interagerar med robotar, det är viktigt för människor att ha exakta förväntningar på robotens kapacitet, " Minae Kwon, en av forskarna som genomförde studien, berättade för TechXplore. "Ett sätt att ställa exakta förväntningar är att förstå vad robotar är oförmögna att göra och varför."
För närvarande, de flesta robotfel är extremt oinformativa. Med andra ord, när roboten inte kan slutföra en uppgift, det kan stoppa plötsligt mitt i en åtgärd eller till och med vägra att påbörja uppgiften från första början. Detta gör det svårt för människor att förstå orsaken till robotens misslyckande, samt att generalisera dess förmågor.
"Vi ville hitta ett sätt på vilket robotar på ett mer intelligent sätt kunde kommunicera sina oförmåga (d.v.s. vad de försöker göra och varför det kommer att misslyckas) även innan ett misslyckande inträffar, " sa Kwon. "Närmare bestämt, vi fokuserade på oförmåga relaterade till rörelseplaneringsuppgifter (t.ex. att lyfta en kopp, trycker på en dörr), eftersom vi ville lösa detta problem med hjälp av uttrycksfulla rörelser."
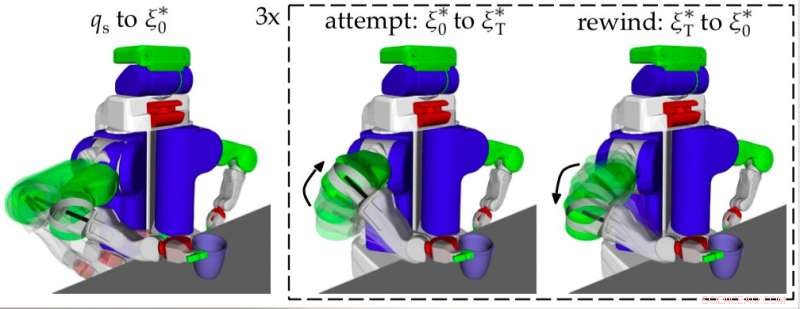
För en given ofullständig uppgift, roboten utför först uppgiften tills felet inträffade (vänster), vid vilken punkt den exekverar försöksbanan ξ ∗ (mitten). För att betona denna rörelse, roboten utför sedan baksidan av ξ ∗ för att spola tillbaka till ξ ∗ 0 (höger), och upprepar detta två gånger till. Kredit:Kwon, Huang och Dragan.
Kwon, hennes kollegor Sandy Huang och deras rådgivare Anca Dragan tog upp detta problem i samband med banoptimering. Deras tillvägagångssätt minimerar likheten mellan rörelsen som uttrycker oförmåga och vad som skulle tillåta roboten att framgångsrikt utföra uppgiften, samtidigt som robotens fysiska begränsningar beaktas. När forskarna utvärderade olika likhetsmått, de fann att man i synnerhet generaliserade väl till ett brett spektrum av uppgifter, producera uttrycksfulla rörelser som är skräddarsydda för individuella uppgifter.
"Vi genererar en försöksrörelse, eller en rörelse där roboten gör sitt bästa för att slutföra den bana den skulle ha följt, som är föremål för en begränsning, " Kwon förklarade. "Att följa den önskade banan illustrerar robotens mål och begränsningen illustrerar misslyckandet. För att kommunicera oförmågan, vi spolar tillbaka och upprepar dessa försöksrörelser i följd."
Metoden som forskarna använder genererar automatiskt rörelser som uttrycker robotens oförmåga, kommunicera både vad den försöker uppnå och orsakerna bakom dess misslyckande. Detta kan i slutändan förbättra kommunikationen mellan slutanvändare och robotar, underlätta deras samarbete kring ett brett spektrum av uppgifter.
"Vi tycker att det är viktigt att människor inte bara kunde känna igen robotens avsedda mål och orsaken till oförmågan tydligare jämfört med andra tillvägagångssätt, men att våra rörelser också skapade en positiv bild av roboten, sa Kwon. "Till exempel, människor var mer villiga att hjälpa roboten och samarbeta med den. Vi hoppas att dessa positiva konsekvenser för samarbete mellan människa och robot kommer att bidra till att förbättra vårt sätt att interagera med robotar."
I framtiden, metoden utvecklad av Kwon, Huang och Dragan skulle kunna hjälpa utvecklingen av mer kommunikativa robotar, ytterligare förbättra interaktionen mellan människor och maskiner. Forskarna planerar nu att utveckla sitt tillvägagångssätt ytterligare, för att generera rörelser för ett bredare utbud av uppgiftsfel.
"Vi har bara riktat in oss på en delmängd av möjliga oförmåga som roboten kan ha, utelämna andra typer av misslyckanden, såsom uppfattningsfel, "Kwon sa. "Att komma på kreativa sätt att uttrycka olika typer av oförmåga är en intressant utmaning som vi lämnar till framtida arbete."
© 2018 Science X Network