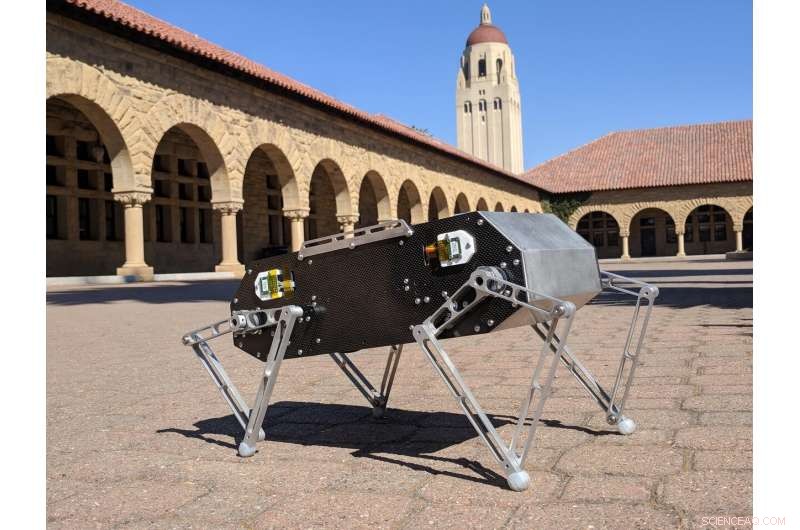
Stanford Doggo. Kredit:Kau et al.
Forskare vid Stanford University har nyligen skapat en fyrbäddsrobot med öppen källkod som heter Stanford Doggo. Deras robot, presenteras i en tidning som förpublicerats på arXiv och som ska publiceras av IEEE Utforska , överträffar prestandan hos många toppmoderna robotar med ben i vertikal hoppningsförmåga.
"För ungefär ett och ett halvt år sedan, Jag startade underteamet Extreme Mobility på Stanford Student Robotics, " Nathan Kau, en av forskarna som genomförde studien, berättade för TechXplore. "Vi var intresserade av att bygga smidiga robotar som kunde utforska miljöer där hjulförsedda eller flygande fordon inte skulle vara effektiva. Det finns redan några riktigt fantastiska robotar som kan arbeta i den här typen av miljöer, men de var ganska dyra, anpassade mönster som vi inte skulle kunna replikera. Så förra året, vi satte igång att designa och prototypa en billig fyrbensrobot inspirerad av dessa grupper, och Stanford Doggo är resultatet av våra ansträngningar."
Roboten som utvecklats av Kau och hans kollegor har fyra ben, var och en drivs av två motorer. Remdrifter ansluter motorerna till benlänkarnas axlar, vilket gör att länkarna roterar med en tredjedel av motorernas hastighet. Denna hastighetsminskning nästan tredubblar vridmomentet, och förhållandet är tillräckligt lågt för att säkerställa att krafter från omgivningen avkänns av motorn.
"Denna effekt liknar att cykla på en låg växel, och det är lättare att känna gupp på vägen i fötterna än på hög växel, " Kau förklarade. "Dessa typer av mekanismer, kallas kvasi-direktdrivna ställdon, är något vanliga nu i robotar med ben. Dock, vi fann att få om några grupper använde denna typ av ställdon på mindre, billiga gångrobotar."
Stanford Doggo är en mycket smidig och billig robot som enkelt kan replikeras. Anmärkningsvärt, roboten har satt ett nytt rekord för vertikal hoppförmåga bland alla robotar eller djur, fördubbling av hopphöjden för tidigare fyrbäddsrobotar. Stanford Doggo är också mycket billigare än andra benrobotar, som vanligtvis kostar tiotals eller hundratusentals dollar.
"Totalt, Stanford Doggo kostar cirka 3000 USD att bygga, inklusive alla tillverkningskostnader du skulle ådra dig om du inte har dyra verktygsmaskiner som kvarnar eller svarvar, " sa Kau. "Den låga kostnaden gör att roboten är mer tillgänglig för andra, speciellt om de inte är i ett universitetslabb. Dess viktigaste egenskap, dock, är att den körs på hårdvara och mjukvara med öppen källkod och att vi har släppt detaljerade planer, dellistor och instruktioner."
I en serie utvärderingar utförda av Kau och hans kollegor, Stanford överträffade andra fyrbäddsrobotar med en betydande marginal. Dess vertikala hoppförmåga, ett mått på genomsnittlig vertikal hastighet, matchade den för det smidigaste djuret och överträffade den för den bäst presterande benroboten med 22 procent. Flera andra intressanta robotar utvecklas just nu, så snart kan Stanford Doggos titlar ändras. Ändå, dess vertikala hoppförmåga är fortfarande mycket anmärkningsvärd.
"Vi hoppas att fler och fler laboratorier kommer att kunna testa nya styrtekniker med vår robot som plattform, " sa Kau. "Vi tror att om fler människor arbetar med dessa typer av robotar, de kommer att bli redo snabbare för verkliga tillämpningar som leverans av kritiska förnödenheter eller sök och räddning. Vi hoppas också att vår robot ska inspirera studenter att börja utforska området benrobotik. Det är i allmänhet ett dyrt område inom robotik att arbeta i, så vi hoppas att Stanford Doggo kommer att sänka inträdesbarriären."
Kau och hans kollegor har lyckats utveckla den allra första billiga och mycket smidiga fyrbäddsroboten designad för forskningsapplikationer. Stanford Doggo är helt öppen källkod och är byggd med väldigt få anpassade delar, så det kan lätt återskapas. Forskarna hoppas att andra robotteam kommer att bygga vidare på och förbättra sin robot, vidareutveckla sin forskning.
Kau och hans kollegor arbetar också på en större version av Stanford Doggo, kallas Stanford Woofer. Stanford Woofer är ungefär dubbelt så stor som Doggo och kan bära cirka 6 kg extra utrustning, såsom sensorer och en robotarm.
"Stanford Doggo är fortfarande i hög grad ett pågående projekt, " tillade Kau. "T.ex. vi arbetar på att införliva en hel uppsättning sensorer i roboten inklusive LIDAR. Ett annat delprojekt är att få roboten att se lite mindre bar ut och mer lättillgänglig, speciellt eftersom vi tror att detta kan vara en effektiv plattform för utbildning och uppsökande verksamhet. Vi skriver också en omfattande instruktionsbok för att komplettera vårt befintliga material med öppen källkod, som ger steg-för-steg instruktioner om hur du bygger din egen Stanford Doggo."
© 2019 Science X Network