Kredit:Soter et al.
Forskare vid Bristol Robotics Laboratory och University of Bristol har nyligen utvecklat en ny mjuk robothudliknande sensor som är baserad på fluidtransmission. Denna sensor, presenterades vid den andra IEEE International Conference on Soft Robotics (RoboSoft), kan ha intressanta tillämpningar inom en mängd olika områden, allt från robotik till virtuell verklighet (VR).
"Att integrera sensorer i robothänder är en svår uppgift eftersom ofta, vi måste klämma in många komponenter på ett begränsat utrymme, "Gabor Soter, en av forskarna som genomförde studien, berättade för TechXplore. "Vår idé var att överföra de sensoriska signalerna till andra delar av kroppen, där det finns mer utrymme för avkännings- och bearbetningshårdvaran."
Hudflöde, sensorn utvecklad av Soter och hans kollegor, är delvis inspirerad av biologiska mekanismer som observerats hos spindlar. Spindlar kan överföra hydrauliskt tryck till olika delar av deras kroppar för aktiveringsändamål. Med andra ord, de kan generera tryck inuti sina kroppar och överföra denna energi till sina ben för att flytta dem.
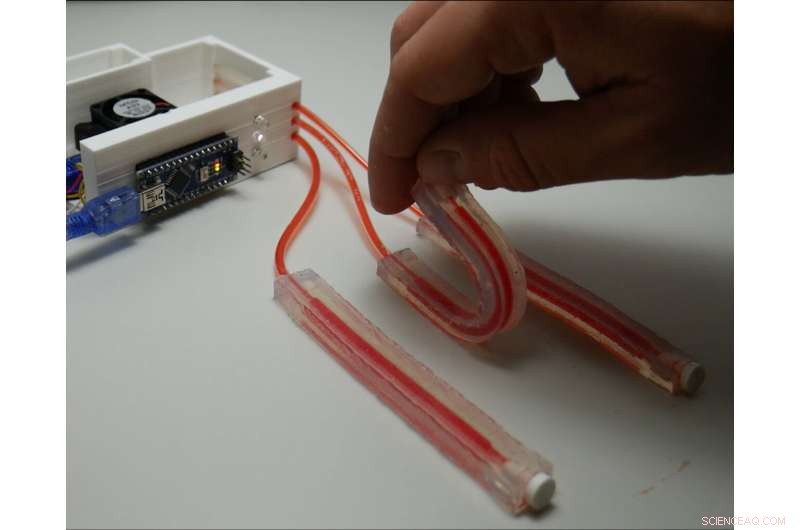
Forskarna försökte reproducera denna mekanism genom att kombinera vätskefyllda mjuka silikonkammare med optiska sensorer som mäter tryck, böjning och vibration. Skinflow har tre nyckelkomponenter:en mjuk hud fylld med färgad vätska, en display och en kamera. När den är mekaniskt stimulerad, volymen på dess silikonkammare ändras, och denna förändring överförs till dess display via en inkompressibel, färgad vätska.
"På grund av interaktion med huden, volymen av Skinflows kammare förändras och detta tränger undan den färgade vätskan, ", förklarade Soter. "Vätskeförskjutningen mäts av en kamera och vi använder bildbehandlingsalgoritmer för att kvantifiera denna förändring. Den här vägen, vi kan tillbaka beräkna platsen och intensiteten av användarens interaktion med robothuden."
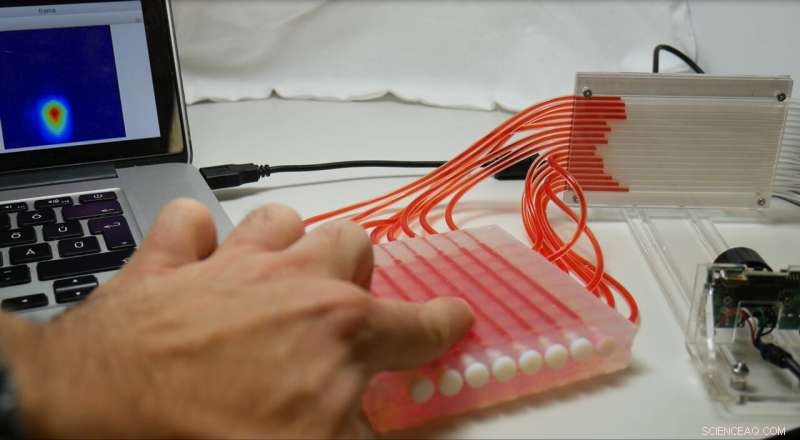
Pekplattan utvecklad med Skinflow. Kredit:Soter et al.
Hudflödessensorer är anmärkningsvärt låga, skalbar och säker att använda i mänskliga miljöer. I sin studie, forskarna presenterade tre möjliga implementeringar för sin sensor. Först, de använde den för att skapa en mjuk knapparray med fyra tryckkänsliga knappar.
De använde den också för att bygga en 3D mjuk pekplatta som består av två sensorlager orienterade i 90 grader mot varandra, som båda har åtta makrokanaler fyllda med färgad vätska. I denna implementering, Skinflow användes för att mäta positionen och intensiteten av en användares beröring.
Till sist, forskarna integrerade sensorn med en smart visionkamera och mikrokontroller. De kopplade sedan tre mjuka böjsensorer till en enhets processorenhet och använde dem för att kontrollera ljusstyrkan på tre LED-lampor i realtid genom att böja dem.
"Skinflow kan ha många applikationer inklusive virtuell verklighet, robotik, sjukvård, smarta hem, bärbar teknik och telemanipulation, ", sa Soter. "Det är också en mycket lovande teknik för applikationer där vanliga elektroniska komponenter inte kan användas på grund av elektromagnetiska störningar, till exempel i magnetisk resonanstomografi (MRI) skannrar, eller radioaktivitet, till exempel i kärnkraftverk."
I framtiden, sensorn som utvecklats av Soter och hans kollegor skulle kunna hjälpa utvecklingen av ett brett spektrum av innovativa och smarta teknologier. Forskarna experimenterar för närvarande med Skinflow och använder det för att utveckla nya bärbara och mänskliga interaktionsenheter.
© 2019 Science X Network