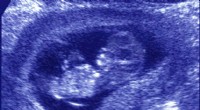
Användning av den mjuka ringoscillatorn för att styra en uppblåsande mekanoterapeutisk anordning applicerad på underbenet. Kredit:Preston et al., Sci. Robot. 4, eaaw5496 (2019)
Mjuka robotar kan inte alltid konkurrera med de hårda. Deras stela bröder dominerar löpande band, utföra backflips, dansa till Bruno Mars "Uptown Funk, "flyga, dyka, och gå genom vulkaner.
Men varje år, mjuka robotar får nya förmågor. De har lärt sig att hoppa, våndas, och grepp. Och, till skillnad från hårda robotar, de kan hantera tomater utan att blåsa frukten, återuppstår oskadat efter att ha blivit påkörd av en bil, och resa genom strålning, katastrofzoner, och yttre rymden med få ärr. För människor och djur, de har en "kooperativ funktion":en mjuk beröring.
Nyligen, forskare i George M. Whitesides labb, professorn vid Woodford L. och Ann A. Flowers University, har uppfunnit mjuka ersättningar för de sista hårda delarna som krävs för att bygga en robot. Istället för el och kablar, trycksatt luft expanderar och drar ihop gummibåtar för att skapa rörelse, mjuka ventiler tar över för det hårda, och mjuk digital logik replikerar samma möjligheter som en elektronisk dator.
Nu, postdoktorn Daniel J. Prestons senaste mjuka uppfinning ger dessa robotar nya, komplexa rörelser. Som första författare på en studie publicerad i Vetenskapsrobotik , han introducerar den första mjuka ringoscillatorn, vilket ger mjuka robotar möjlighet att rulla, bölja, sortera, mätare vätskor, och svälja.
"Det är ytterligare ett verktyg i verktygslådan för att göra dessa smarta, mjuka robotar utan elektronik, och utan några hårda ventiler, Säger Preston.
Tills nu, ringoscillatorer tillverkades med elektroniska transistorer eller mikrofluidik. Elektronik kräver alltid hårda komponenter. De flesta mikrofluidik gör, för. Många använder glas för sina tryckvatten- eller luftsystem och kräver tunna kanaler som bara kan hantera mycket låga flödeshastigheter, begränsa drifthastigheter. Små mikrofluidiska system kan uppnå högre frekvenser än Prestons pneumatiska ringoscillator i makroskala, men hans team har redan ritningar för att justera sitt mjuka system för att uppnå högre hastigheter, om det behövs.
Den mjuka ringoscillatorn - som alla ringoscillatorer - är beroende av växelriktare ("NOT" digitala logiska grindar). Prestons växelriktare, till exempel, manipulera lufttrycket i sin robots gummirör:Om ingången är högtryck, utgången kommer att vara lågtryck och vice versa. När tre, eller något udda tal, av grindar är anslutna i en ring, en grind skift utlöser nästa, som utlöser nästa, och så vidare.
"Det coola svaret du får när du kombinerar ett udda antal av dessa växelriktare i en slinga är en instabilitet som rör sig runt slingan, " säger Preston. Som en slinky som kollapsar för att springa ner för en trappa, en rörelse gnistor nästa, skapa ett konstant tempo utan att behöva ytterligare en push.
För att testa vad den mjuka ringoscillatorn kunde göra, Preston och hans team skapade fem mjuka robotprototyper. Var och en använder en singel, konstant lufttryckskälla för att köra tre pneumatiska ställdon (växelriktarna).
En prototyp knuffar en boll runt en ring. En annan böljar en scen för att hålla pärlor i två olika storlekar rullande mot kanten. Så småningom, alla de mindre pärlorna faller genom ett hål i sidan av scenen. De reder ut sig själva.
"Ringoscillatorn är riktigt bra för saker som rullande rörelser, " säger Preston. Rullning kräver samordning av flera åtgärder i tiden. En enda ingång och utdata räcker inte. Till exempel, för att få sin sexkantiga skumrobot att rulla framåt, ringoscillatorn hjälper till att blåsa upp en ballong bakom roboten och tömma en framför samtidigt. Den koordinerade tryck-och-släpp-knappen förskjuter sexkanten framåt gång på gång när ballongerna blåses upp och töms i perfekt synk.
Ännu en prototyp ger ett mer påtagligt syfte. En textilbaserad hylsa, virad runt underbenet och fäst med kardborreband, utövar samordnat tryck, "pumpar" vätska upp i benet.
Enligt nyare studier, denna "pumpande" rörelse förbättrar symtomen på lymfödem och kronisk venös sjukdom bättre än enkel kompression. Enheten kan också hjälpa sjuksköterskor, servitörer, och poliser förhindrar djup ventrombos, ett resultat av att arbeta långa pass på trötta fötter.
Innan de börjar kliniska prövningar för sin ärm, laget vill mäta intresset. Om tillräckligt många längtar efter en mjukare, billigare sätt att lindra och förebygga symtom, produkten kanske bara hittar en tillräckligt stor marknad för att förtjäna ytterligare forskning.
Den låga kostnaden för Prestons material – gummiliknande silikonelastomerer – gör dem idealiska för mer än bara billig hemvård. Biokompatibel, disponibel, mild, och sterila versioner kan användas för laboratorieexperiment, drogleverans, eller till och med medicinsk utrustning inuti kroppen som den här hylsan som hjälper hjärtat att slå. Prestons slutliga prototyp kan sortera tre olika färgade vätskor baserat på en förutbestämd sekvens och tid, ett verktyg som kan visa sig vara användbart för kemister.
Även om alla Prestons prototyper är gjorda av endast mjuka material, de är ännu inte obundna:Alla förlitar sig på en konstant källa av tryckluft. Ändå har Preston och hans kollegor några lösningar för detta, för. För benärmen, patienter kan förse sin egen luft med en handhållen pump som den som används för att ta blodtryck. Och mjuka robotar i skyttegravarna kunde använda mobila koldioxidpatroner, fastspänd som en ryggsäck, eller gasgenererande kemiska reaktioner för att sätta bot i rörelse.
Men Preston förväntar sig att hans nya verktyg ska uppnå mycket mer än de applikationer som visas i hans fem prototyper. Eftersom uppsatsen förklarar hur man replikerar och anpassar designen, han hoppas att andra labb kommer att hitta ännu fler användningsområden. "Människor kan använda den mjuka ringoscillatorn för många olika applikationer inom mjuk robotik, några som vi kanske inte ens har tänkt på eller föreställt oss ännu."