Kredit:University of Warwick
Passagerares och fotgängares förtroende och acceptans kommer att vara nyckeln till framtiden och utvecklingen av autonoma fordon, så forskare vid WMG vid University of Warwick har just genomfört och rapporterat ett experiment för att se vilka autonoma fordons körstil som skapade högsta förtroende hos autonoma passagerare —Körning med full maskineffektivitet, eller körning på ett sätt som efterliknar genomsnittlig mänsklig körning. Det överraskande resultatet var att ingen av dem var optimala men att en blandning av båda kan vara bäst.
Forskarna tog in 43 volontärer till ett stort lager som är utformat för att likna ett fotgängarområde i en stadskärna med en rad vägar som inkluderade en rad korsningar. Hälften fick 4 resor runt rutten i ett autonomt fordon som körde med full maskineffektivitet och använde alla dess möjligheter för att köra på ett så säkert och effektivt sätt som möjligt medan de andra fick 4 resor runt rutten i autonoma fordon som försökte nära efterlikna genomsnittet mänskliga körmönster. De fick sedan förtroendet för de autonoma fordonen. Resultatet har just publicerats i tidningen Information .
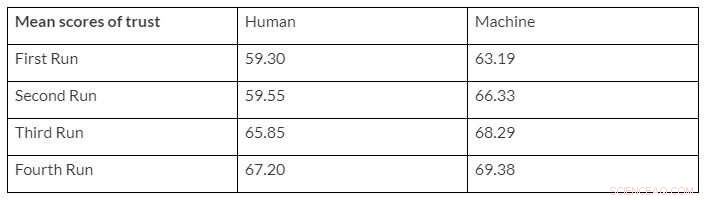
Det övergripande resultatet var att det bara var en marginell skillnad i förtroende mellan de två körmetoderna. Den effektiva maskinmetoden gynnades något men även det lilla gapet mellan de två körstilarna minskade över de fyra körningarna. Det som var märkbart för både "maskinen" och "mänskliga" körstilar är att förtroendet för båda växte med varje ny omgång som tyder på att enkel förtrogenhet och ökad vana vid erfarenheten kommer att vara ett av de mest effektiva sätten att snabbt bygga upp förtroende och acceptans av autonoma fordon när deras användning blir mer utbredd.
Kredit:University of Warwick
Dr Luis Oliveira från WMG vid University of Warwick och huvudförfattaren på tidningen sa:
"Det övergripande förtroendet för båda körmetoderna växte för varje körning. I maskinliknande körstil var detta en stadig uppåtgående kurva under de fyra resorna, men i människoliknande beteende skedde en särskilt brant förändring uppåt i poängen mellan körningar 2 och 3 Passagerarna i experimentet erkände också att framtida generationer kan vara mer bekväma med AV -apparater och dess funktioner, när de lär sig att leva med den nya tekniken. "
Forskarna bad också deltagarna att berätta om sina erfarenheter och detta visade att det fanns fördelar med båda körsätten som därför kan behöva blandas ihop i ett framtida slutpaket. Forskarnas litteraturöversyn och lagerförsök klargjorde att det fanns två särskilt tydliga lärdomar att ta:
WMG:s doktor Luis Oliveira sa:
"Detta visar att utmaningen är att hastigheten och banan för autonoma fordon ska kontrolleras fint, men samtidigt bör fordonet vara självklart för att ge fördelarna med automatisk körning. "
Det var dock AV:s beteende vid korsningar i lagertestet vid WMG University of Warwick som gav de mest varierande och överraskande reaktionerna.

Kredit:University of Warwick
De maskindrivna AV:erna fick använda alla sina sensorer och förmåga att kommunicera med fordon som kan vara utom synhåll för att avgöra om de skulle komma in i en korsning. Om deras sensorer sa att det var säkert och deras kommunikation med andra fordon indikerade inga hot som närmar sig skulle de helt enkelt gå in i korsningen utan att stanna. Om de däremot upptäckte ett fordon som de ansåg borde ha rätt att gå - även om det ännu inte var synligt för den mänskliga passageraren skulle de stanna och låta fordonet passera. Däremot skulle AV:s emulerande mänskliga körning alltid stanna vid en korsning och till och med komma in i korsningen som om man tittar på vad den mötande trafiken kan vara.
Reaktionerna på de två olika metoderna var mycket varierande och överraskande.
Vissa gillade det mänskliga tillvägagångssättet med en som sa att AV var "... förmodligen försöker väcka förtroende för passageraren, Jag gissar, i termer av hur det betedde sig, ganska lik en människa, det kommer bara att väcka förtroende, jag tror att det är för att det är vad vi är vana vid.
Vissa gillade också den metod för maskindrivande att stanna vid korsningar, även om det inte fanns något synligt problem, men för att det var i kommunikation med ett annat utom synhåll fordon som det uppfattade hade rätt att gå. En passage sa:"den stannade vid en korsning, för jag antar att det visste att något skulle komma, i motsats till att den reagerar på att se något komma ”.
Likaså fanns det ogillar för både de mänskliga och maskinella körmetoderna för att hantera en korsning.
Vissa uppfattade problem med maskinsättet att bara gå in i korsningen om det ansåg att det var klart att göra det med en som sa att de var oroliga för sårbara trafikanter. "..som fotgängare eller cyklister som kunde ha varit där som inte kommunicerar med podden. Det kan vara ett säkrare sätt att göra det än att flyga runt hörnet".
Men andra blev mycket överraskade över att den "mänskliga" körmetoden AV stannade vid varje korsning eftersom de inte bara såg det som slöseri med maskinernas möjligheter att skanna och kommunicera framåt för att förstå trafik. De var frustrerade över att fordonet inte var "mer självklart" En passagerare sa "ibland förväntade jag mig inte att det skulle stanna, för jag trodde att den andra podden var lite längre bort men då gjorde den, så jag antar att det är försiktigt ... om jag körde hade jag förmodligen åkt. "En annan passagerare sa" Om jag var i en autonom pod med sensorer som alltid ger 360-gradersvy, Jag skulle förvänta mig att fordonet omedelbart skulle veta om det var säkert eller inte, och behöver inte kanta ut ".
En ytterligare passagerare som testade den mänskliga versionen, kommenterade att en maskin som körde som en människa och försökte se sig runt hörnen verkade ironiskt onaturligt och sa:"Jag tycker att det var lite oväntat eftersom min förväntan med baljorna är att det skulle finnas någon o-naturalism i det snarare än en människa förare".
Trots denna till synes massa motsättningar i synpunkter på hur AV:er ska hantera korsningar tror forskargruppen att det finns värdefulla lärdomar att ta även här. Särskilt: