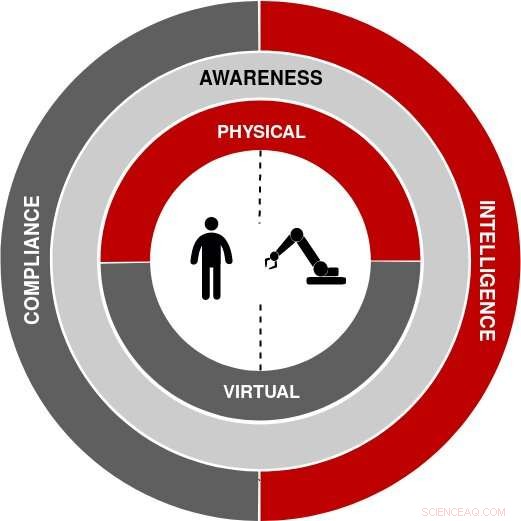
Ett systemdiagram för det konceptuella ramverket för ett mänskligt robotsamarbete som system av system som belyser de tre aspekterna av ett HRC-system:Medvetenhet, Intelligens och efterlevnad. Kredit:Savur, Kumar och Sahin.
Forskare från Century Mold Collaborative Robotics Laboratory (CMCRL) vid Rochester Institute of Technology (RIT) i New York har nyligen utvecklat ett nytt ramverk för att övervaka mänskliga fysiologiska svar medan användare samarbetar med en robot för att slutföra en uppgift. Under överinseende av prof. Ferat Sahin, chef för Multi Agent Bio-Robotics Laboratory, CMCRL-forskare arbetar med att utveckla system, ramverk och mjukvaruverktyg för att studera samarbete mellan människa och robot i en industriell miljö. Deras nya tillvägagångssätt, beskrivs i ett dokument som förpublicerats på arXiv och som kommer att presenteras på IEEE Systems, Man &Cybernetics-konferens i Bari (Italien), möjliggör kontinuerlig insamling av fysiologiska data under interaktioner mellan människa och robot, samtidigt som man ändrar en robots rörelser för att utlösa ett svar hos den människa som den interagerar med.
Många experter tror att snart, människor och maskiner kommer att arbeta tillsammans inom en mängd olika områden, inklusive industri och tillverkning. För att möjliggöra effektiv automation och samarbete mellan människa och robot, dock, forskare kommer att behöva utveckla tillvägagångssätt som utnyttjar mänskliga färdigheter som beslutsfattande, fingerfärdighet, flexibilitet och kreativitet, kombinera dessa med hastigheten, noggrannhet och kraft förknippad med robotar.
Faktiskt, medan fullständig automatisering skulle bli mycket dyr, Tillverkning som utförs manuellt av enbart människor är ofta långsam och risk för fel. Att utveckla verktyg som förbättrar samarbete mellan människa och robot är därför viktigt. Enligt RIA, detta kommer att vara en central del av den femte industriella revolutionen, även känd som Industry 5.0.
"Enligt vår åsikt finns det tre huvudutmaningar för samarbete mellan människa och robot i industrin. De är säkerhet, mänskligt förtroende för automatisering och produktivitet, "Shitij Kumar, en av forskarna som genomförde studien, berättade för TechXplore. "Alla dessa är beroende av varandra. För att möta dessa utmaningar, Vi utvecklade först en HRC-uppsättning som ett system av system som skulle göra det möjligt för oss att skapa olika scenarier för samarbete mellan människa och robot och förstå och analysera interaktioner mellan människa och robot."
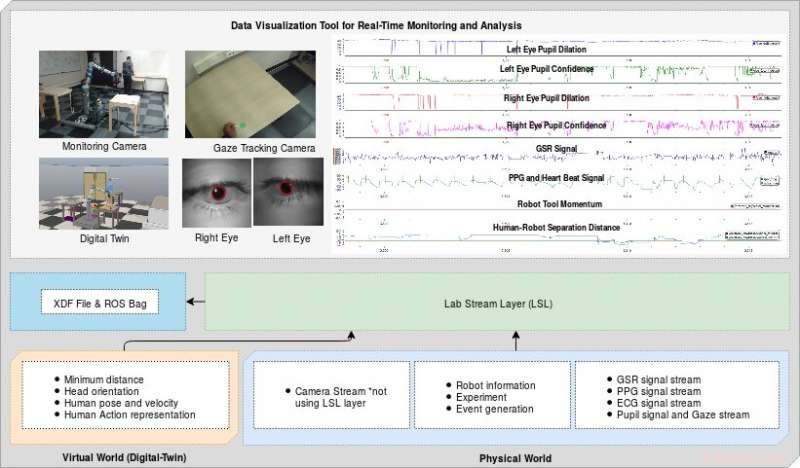
Ett systemdiagram över implementeringen baserat på det föreslagna ramverket som representerar datainsamlingen och övervakningen under ett HRC-experiment. Kredit:Savur, Kumar och Sahin.
Som en del av sin doktorsexamen, under ledning av Dr. Ferat Sahin, direktören för CMCRL, Kumar började utveckla ett system som ändrar robotbeteende baserat på separationsavstånd mellan människa och robot och åtgärder i den delade arbetsytan. I detta sammanhang, en robots beteende är deterministiskt och förutsägbart baserat på regler.
Trots löftet som hans inställning visar, han fann att mänsklig feedback inte alltid förekom, vilket gjorde det svårare för hans system att uppnå tillfredsställande robotöverensstämmelse. Robotöverensstämmelse innebär i huvudsak att roboten kan hantera förväntningarna hos människor som den interagerar med och effektivt kommunicera med dem.
"Vi trodde att en bättre efterlevnad av systemet som ger operatören som arbetar med roboten en känsla av kontroll och förutsägbarhet av robotbeteende skulle öka hans/hennes förtroende för automatisering, "och därigenom öka produktiviteten för uppgiften, " sade Kumar. "Men, då började vi undra, hur kvantifierar man "förtroende" eller komfortnivå för en mänsklig operatör som arbetar med roboten?"
Kumar och hans kollegor tror att övervakning av mänskliga fysiologiska signaler, som är indikatorer på psykisk och fysisk stress, såväl som andra känslor, under en uppgift som involverar interaktion mellan människa och robot skulle vara ett steg i rätt riktning. Denna uppfattning stöds av tidigare forskning som fann att sådana signaler (kända som psykofysiologiska svar) är pålitliga indikatorer för att förändra robotbeteende och rörelse.

Sensorer och enheter som används i prototypimplementeringen. Forskarna använde ett motion capture-system för att övervaka mänsklig rörelse och en kamera för att spela in experimentet. De spårade också mänsklig blick med hjälp av Pupil Labs och mänskliga fysiologiska reaktioner som pupillvidgning, PPG, GSR, EEG \&EKG registrerat. Kredit:Savur, Kumar och Sahin.
Med detta i åtanke, Celal Savur, en Ph.D. Student vid RIT:s CMCRL, genomfört en studie för att utforska effekterna av robotens rörelser och beteende på mänskliga psykofysiologiska reaktioner. Huvudmålet med hans studie var att förstå vilka förändringar i en robots rörelse som resulterar i "mänskliga obehagsreaktioner" som rädsla eller stress.
"För att göra detta, ett ramverk för ett system som representerar och registrerar robotens rörelse och människans fysiologiska tillstånd samtidigt behövdes, ", förklarade Savur. "När förhållandet mellan robotens rörelse och det mänskliga fysiologiska tillståndet har identifierats, det mänskliga fysiologiska svaret kan användas som en återkoppling för att direkt styra/uppdatera robotens rörelse/beteende. Sådana system kallas "fysiologiska beräkningssystem." Fysiologisk beräkning är en delmängd av affektiv beräkning som ofta används i datorspel, där spelen anpassar sig i realtid till spelarens svar, för att uppnå en mer interaktiv spelupplevelse."
I deras studie, Savur och Kumar siktar på att utveckla ett ramverk som kan övervaka mänskliga psykofysiologiska reaktioner när användare slutför uppgifter som involverar samarbete mellan människa och robot. Deras arbete ligger i skärningspunkten mellan datavetenskap, robotik och psykofysiologi, en gren av neurovetenskap som försöker förstå hur en persons mentala tillstånd och hans/hennes fysiologiska reaktioner interagerar eller påverkar varandra.
Ramverket som de utvecklade faller under kategorin "fysiologisk datoranvändning." Detta är en typ av affektiv datoranvändning som innehåller mjukvaruanpassning i realtid till användarens psykofysiologiska aktivitet. ramverket de föreslog kan användas för att undersöka hur förändringar i robotens rörelse (t.ex. hastighet och bana) påverkar den mänskliga operatören i en industriell miljö.
"Låt oss överväga, till exempel, att det finns två operatörer som arbetar med en robot, operatör A och B, " Kumar förklarade. "Operatör A har arbetat längre och är bekväm med att arbeta med roboten, eftersom han/hon kan förutsäga robotens beteende utifrån erfarenhet. Operatör B är ny och är lite skeptisk till robotrörelsen. Robotbeteendet förändras i termer av hastighet med vilken den rör sig och hur mycket avstånd den håller när den är nära operatören baserat på operatörens fysiologiska tillstånd och beteendemönster. I detta scenario, för en bättre interaktion mellan människa och robot, roboten kan röra sig med högre hastigheter när den arbetar nära operatör A, och gå långsamt och arbeta med operatör B. När operatör B får mer erfarenhet, robotens rörelse kan anpassa sig till det, därigenom bygger förtroende och påverkar den övergripande produktiviteten positivt."
Studien som utfördes av forskarna i CMCRL hade två huvudmål. Den första var att skapa en databas med samarbetsuppgifter mellan människa och robot, registrerar interaktioner mellan människa och robot. De ville sedan använda denna databas för att undersöka hur mänskliga fysiologiska reaktioner kan användas för att påverka en robots rörelse, påverkar automatiseringsprocessen positivt. Med andra ord, deras mål var att bygga ett fysiologiskt datorsystem för samarbete mellan människa och robot i industri- och tillverkningsmiljöer.
"Vårt ramverk är i huvudsak ett system som representerar och registrerar robotens rörelse och mänskliga fysiologiska tillstånd samtidigt, " sa Kumar. "För att registrera denna information, ramverket tillhandahåller gränssnitt till roboten, sensorer som kameror, motion capture system och även till de biologiska/biometriska datainsamlingsanordningarna. Eftersom alla dessa enheter fungerar med olika samplingsfrekvenser, detta ramverk hjälper till med synkron datainsamling och representation av människa-robotsamarbetet."
I traditionella experimentella uppställningar för social robotik, mänskliga försökspersoner ställs frågor om sina erfarenheter och uppfattningar under eller efter ett experiment. Med hjälp av deras feedback, forskare kan sedan analysera och kvantifiera de subjektiva data som samlats in under experimentet.
"Metoder som avbryter ämnen eller får ämnet att minnas deras erfarenheter, dock, inte alltid kan upprätthålla experimentets integritet eller korrekt representera subjektiva data, " Kumar förklarade. "Därför, till skillnad från traditionella metoder, Denna implementering av ramverket gör det möjligt för den mänskliga subjektet eller huvudutredaren att generera händelsemarkörer när experimentet/uppgiften för mänsklig robotsamverkan (HRC) utförs."
Deras ramverk kan automatiskt generera händelsemarkörer baserade på människa-robot-representationen i en virtuell värld, som är känd som en digital tvilling. Till exempel, det kan hjälpa till att identifiera när roboten och människan var närmast varandra under uppgiften, när roboten var tvungen att stanna eller avbröts av en mänsklig handling, utvecklingen av uppgiften som utförs av människan, händelser baserade på kommandon eller kontroll av den mänskliga operatören, en händelse när roboten arbetade med maximal hastighet, och början/slutet av en uppgift.
"Vårt ramverk tillhandahåller också ett användargränssnitt för forskarna att spela upp och visualisera sina HRC-experiment, sade Kumar. Dessutom, det låter dem analysera och märka insamlade data. Den kontinuerliga och synkrona insamlingen av fysiologiska data från olika enheter och gränssnitt för dem tillsammans med robotens kontroll och gränssnitt i ett enda ekosystem, tillåter en fullständig representation av människans och robotens tillstånd. Detta kan hjälpa till att förstå orsaken och effekten mellan människans fysiologiska tillstånd och robotens rörelser."
Med tillkomsten av bärbara enheter och Internet of Things (IoT), mänskliga fysiologiska data kommer att bli lättare att samla in och därmed vara lättillgängliga. Ramverket som utvecklats av forskningen kan alltså visa sig vara oerhört värdefullt, eftersom den är utformad för att utnyttja denna data för att förbättra interaktioner mellan människa och robot.
"Det här ramverket möjliggör en kontinuerlig datainspelning med inbyggd händelsegenerering och signalsynkronisering över distribuerade system kan bibehålla integriteten för experimentet (återskapa scenariot för en uppgift i en industriell miljö) och korrekt representera subjektiva data, " sa Kumar.
Kumar och hans kollegor tror att ett medel som är kapabelt till sådan fysiologisk beräkning (d.v.s. som kan upptäcka mänskliga fysiologiska reaktioner och svara på dessa) kan resultera i ett slutet människa-i-slingan-system, där både mänskliga användare och robotar i en HRC-uppställning övervakas och information delas mellan dem. Detta kan leda till bättre kommunikation, som i slutändan kan främja ett större förtroende för automatisering bland allmänheten, samtidigt som produktiviteten ökar. I framtiden, forskarna planerar att göra databaserna som genereras i deras studie tillgängliga för andra HRI-forskare.
"Våra nästa studier kommer att fokusera på att utveckla en komplett användargränssnittsapplikation av det fysiologiska beräkningssystemet för bearbetning av inspelningssignaler, extrahera information och tillämpa maskininlärningsalgoritm för att ge feedback till roboten, "Sa Kumar. "Det slutliga målet med detta arbete är att skapa en databas som kan användas för att främja förståelsen av hur mänskliga fysiologiska svar kan antas resultera i adaptivt robotrörelsebeteende."
© 2019 Science X Network