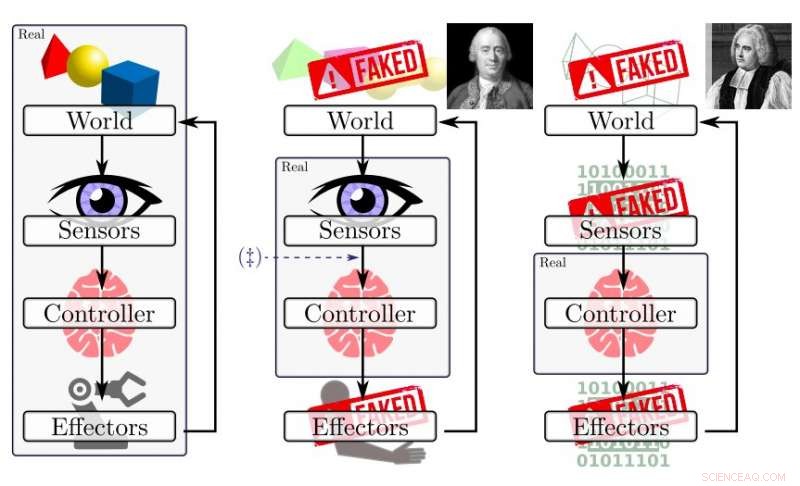
En illustration av olika sätt att fejka matchade med lämpliga intellektuella positioner:den ortodoxa synen (vänster) och två former av filosofisk skepsis (mitten och höger). Den vänstra kolumnen representerar ett fysiskt robotexperiment från början till slut där varje del är verklig. Mellersta kolumnen, bär bysten av David Hume, involverar verkliga sensorer men också anledning att tvivla på sanningshalten i den värld de rapporterar. Kolumnen längst till höger, ledd av biskop Berkeley, har en riktig styrenhet men alla andra element är bara mjukvara - det representerar ett robotexperiment som utförs i simulering (för vanlig användning av den termen) där information injiceras direkt i robotens cortex. Humes kolumn är det fall som studeras i tidningen:robotar uppfattar en värld som förmedlas av sensorer som är förankrade i den verkliga världen, men det är en värld av "ingenting annat än sofistik och illusion." Kredit:Shell &O'Kane.
För att utvärdera prestandan hos robotalgoritmer och styrenheter, forskare använder vanligtvis mjukvarusimuleringar eller riktiga fysiska robotar. Även om dessa kan framstå som två distinkta utvärderingsstrategier, det finns ett helt annat utbud av möjligheter som kombinerar delar av båda.
I en nyligen genomförd studie, forskare vid Texas A&M University och University of South Carolina har satt sig för att undersöka utvärderings- och exekveringsscenarier som ligger i en skärningspunkt mellan simuleringar och verkliga implementeringar. Deras utredning, beskrivs i en tidning som förpublicerats på arXiv, fokuserar specifikt på fall där riktiga robotar uppfattar världen via sina sensorer, där miljön de känner kan ses som en ren illusion.
"Vi överväger problem där robotar konspirerar för att presentera en syn på världen som skiljer sig från verkligheten, " Dylan Shell och Jason O'Kane, forskarna som genomförde studien, skrev i deras tidning. "Förfrågan motiveras av problemet med att validera robotbeteende fysiskt trots att det finns en diskrepans mellan de robotar vi har till hands och de vi vill studera, eller miljön för testning som är tillgänglig kontra det som önskas, eller andra potentiella felmatchningar i denna riktning."
Studien hämtar inspiration från tidigare biologisk forskning, som syftade till att förstå de perceptuella begränsningarna hos levande organismer och hur informationsfelmatchningar kan påverka deras beteende. På senare år har Biologer har börjat använda tekniska verktyg som virtuell verklighet (VR) och förstärkt verklighet (AR) för att få en bättre förståelse för biologiska organismer och deras uppfattningar.
Liknande, mjukvarusimuleringar har blivit en nyckelkomponent i robotforskning, med många forskare som använder dem för att exekvera och testa sina robotsystem och tillvägagångssätt. I de flesta av dessa fall, en simuleringsprogramvara reproducerar vissa delar av en robots exekvering i en virtuell, snarare än fysiskt, miljö, generera artificiella sensoravläsningar eller tillståndsrelaterade data.
Detta ställer en annan fråga:Hur nära är en simulator, som är ett system i sig, faktiskt reproducera den verkliga världen? Med detta i åtanke, forskarna försökte utforska relationerna mellan par av system som "matchar varandra, " samt fall där ett av dessa system är kraftfullt nog att frammana en illusion om det andra.
"Efter att ha formulerat konceptet med en övertygande illusion, i huvudsak en föreställning om systemsimulering som äger rum i den verkliga världen, vi undersöker implikationerna av denna typ av simulerbarhet i termer av infrastrukturkrav, " Shell och O'Kane förklarade i sin uppsats. "Tid är en viktig resurs:vissa robotar kanske kan simulera andra men, kanske, bara i en takt som är långsammare än i realtid."
Shell och O'Kane föreslår att de olika hastigheterna med vilka system kan simulera andra system tillåter forskare att beskriva simulerade och simulerade system i en relativ form. Baserat på detta antagande, de utvecklade några satser för att beskriva sambandet mellan ett simulerat och ett simulerat system, ger flera exempel för var och en.
Senare, forskarna genomförde ett enkelt multirobotexperiment baserat på teorin de utvecklade. I detta experiment, en robot var tvungen att utföra en enkel navigeringsuppgift i ett obegränsat fält av hinder, både i simulering och på en fysisk robottestbädd. Deras resultat tyder på att olika simuleringsmetoder kan ha markant olika tidseffektivitet när det gäller att producera en illusion för ett givet system.
Observationerna som samlats in av Shell och O'Kane, såväl som teorin de utvecklade, skulle kunna bredda den nuvarande förståelsen av simuleringsprogramvara som används för att utvärdera robotteknik, lyfta fram nya aspekter av förhållandet mellan simulerade och simulerande system. I deras framtida arbete, de kunde utforska en mängd nya forskningsriktningar, till exempel att utvidga sin teori till att ta itu med föreställningarna om osäkerhet och icke-determinism eller utveckla en rikare teori om effektiva illusioner.
© 2019 Science X Network