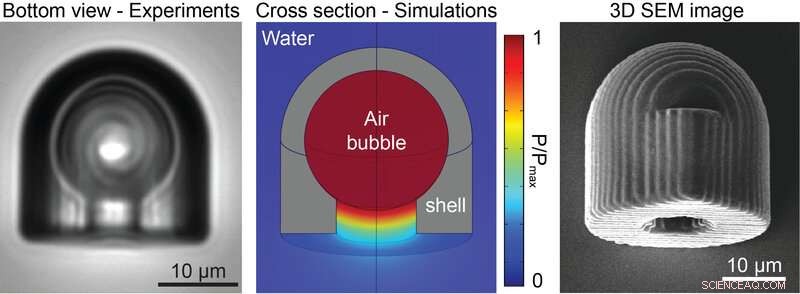
Figur 1. Mikroskopibild av den akustiskt drivna mikroroboten med en instängd sfärisk luftbubbla inuti kroppen (vänster); Akustiskt tryckfält runt mikroroboten förutspått av de numeriska simuleringarna (mitten); Svepelektronmikroskopibild av den tredimensionellt tryckta mikroroboten med en vass fena på toppen (höger). Kredit:Max Planck Institute for Intelligent Systems Stuttgart
Forskare vid Max Planck Institute for Intelligent Systems i Stuttgart har designat och tillverkat en obunden mikrorobot som kan glida längs antingen en platt eller krökt yta i en vätska när den utsätts för ultraljudsvågor. Dess framdrivningskraft är två till tre storleksordningar starkare än framdrivningskraften hos naturliga mikroorganismer som bakterier eller alger. Dessutom, den kan transportera last medan du simmar. Den akustiskt framdrivna roboten har därför betydande potential att revolutionera den framtida minimalinvasiva behandlingen av patienter.
Stuttgart—Forskare vid Max Planck Institute for Intelligent Systems (MPI-IS) i Stuttgart utvecklade en kulformad, syntetisk miniatyrrobot med en diameter på 25 mikrometer, som akustiskt drivs framåt - en kula i fart, i ordets rätta bemärkelse. Mindre än diametern på ett människohår i storlek, aldrig tidigare har en så aktiverad mikrorobot nått denna hastighet. Dess smarta design är så effektiv att den till och med överträffar simförmågan hos naturliga mikroorganismer.
Forskarna designade den 3-D-tryckta polymermikroroboten med en sfärisk hålighet och ett litet rörliknande munstycke mot botten (se figur 1). Omgiven av vätska som vatten, hålrummet fångar en sfärisk luftbubbla. När roboten väl utsätts för akustiska vågor på cirka 330 kHz, luftbubblan pulserar, skjuta vätskan inuti röret mot baksidan av mikroroboten. Vätskans rörelse driver sedan kulan framåt ganska kraftigt med upp till 90 kroppslängder per sekund. Det är en dragkraft som är två till tre storleksordningar starkare än den hos naturliga mikroorganismer som alger eller bakterier. Båda är bland de mest effektiva mikrosimmare i naturen, optimerad av evolutionen.
Att använda ultraljudsvågor för att aktivera mikrorobotar är inget nytt tillvägagångssätt. Dock, tidigare robotar med simförmåga har visat sig vara relativt långsamma, svårt att kontrollera nära ytor, och har haft en relativt kort drifttid på bara några minuter. Alla dessa faktorer är hinder för deras användning i medicinska tillämpningar för riktad läkemedelsleverans, avgiftning, eller icke-invasiva operationer. Forskarna vid avdelningen för fysisk intelligens vid MPI-IS, Dr Amirreza Aghakhani, Okej Yasa, Paul Wrede, och Dr. Metin Sitti, vem är avdelningens direktör, kunde finjustera robotens styrförmåga och samtidigt öka driftstiden till flera timmar. Deras publikation "Acoustically powered surface-sliping mobile microrobots" publicerades i Proceedings of the National Academy of Sciences i februari 2020.
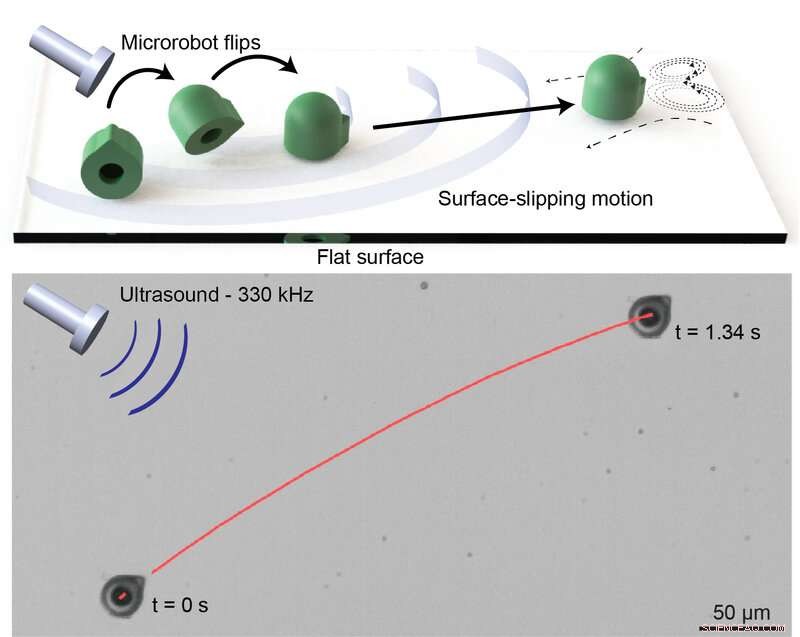
Figur 2. Schema av en mikrorobot som glider på ytan under ultraljudsdrift (överst); Time-lapse-bild av den rörliga mikroboten på ett substrat vid 330 kHz akustisk excitation (botten). Kredit:Max Planck Institute for Intelligent Systems Stuttgart
Förutom att designa roboten med ett inre hålrum som fångar en sfärisk luftbubbla med en liten öppning, de lade till en liten fena på mikrorobotens cylindriska kroppsyta (se figur 2), vilket påverkar framdrivningsriktningen. De täckte också toppen av polymerkulan med ett mjukt magnetiskt nanofilmskikt. Med hjälp av omgivande yttre magnetfält, de kunde sedan ändra kulans riktning åt vänster eller höger, såväl som upp eller ner.
I flera experiment, forskarna testade hur kapabel deras robot är att röra sig på olika ytor inuti en mikrokanal som liknar ett blodkärl. De exponerade roboten för akustiska vågor och ett magnetfält och lyckades navigera i den i detta begränsade 3D-utrymme. De visade också att infångningen av last sker automatiskt medan mikroroboten rör sig. Medan vätskan trycks ut ur robotens hålighet när den utsätts för ultraljudsvågor, ett cirkulärt mikroströmningsmönster genereras mot botten (se figur 2). Denna ström säkerställer att omgivande läkemedelspartiklar styrs mot roboten. Där, partiklarna samlas och transporteras bort med robotens rörelse. Tack vare detta, roboten skulle en dag kunna användas för att samla cancerläkemedelspartiklar inuti blodomloppet och specifikt transportera läkemedlet mot ett karcinom, släpper lasten på nära håll för maximal effekt.
Dr Amirreza Aghakhani, en postdoktor vid avdelningen för fysisk intelligens och medförfattare till publikationen, sammanfattar mikrorobotens speciella egenskaper:"Vi kan aktivera våra mikrorobotar mycket effektivt, och de är också väldigt snabba. Ultraljud är ofarligt för kroppen och kan tränga in i områden djupt inne i kroppen. Vi kan flytta dessa robotar på både plana och krökta ytor på ett kontrollerat sätt och vi kan fästa olika laster, såsom droger. Det här är imponerande."
En annan fördel är ultraljudsundersökning. Inuti kroppen, avbildning är mycket utmanande när roboten bara är flera mikrometer stor. "Dock, den fångade luftbubblan kan fungera som kontrastmedel, göra roboten och dess plats mer synliga, ", tillägger Dr. Aghakhani.
"Vår vision är att distribuera sådana akustiskt drivna och magnetiskt styrda mikrorobotar inuti människokroppen för olika icke-invasiva medicinska tillämpningar inom en snar framtid, " avslutar Dr. Metin Sitti.