MIT -forskare har skapat en "sensurerad" hud, gjord med kirigami-inspirerade sensorer, som ger mjuka robotar större medvetenhet om deras kroppars rörelse och position. Upphovsman:Ryan L. Truby, MIT CSAIL
För första gången, MIT-forskare har gjort det möjligt för en mjuk robotarm att förstå dess konfiguration i 3D-utrymme, genom att endast utnyttja rörelse- och positionsdata från sin egen "sensurerade" hud.
Mjuka robotar konstruerade av mycket kompatibla material, liknande dem som finns i levande organismer, förespråkas som säkrare, och mer anpassningsbar, uthållig, och bioinspirerade alternativ till traditionella styva robotar. Men att ge autonom kontroll till dessa deformerbara robotar är en monumental uppgift eftersom de kan röra sig i ett praktiskt taget oändligt antal riktningar när som helst. Det gör det svårt att träna planerings- och kontrollmodeller som driver automatisering.
Traditionella metoder för att uppnå autonom kontroll använder stora system med flera rörelseupptagningskameror som ger robotarna feedback om 3D-rörelser och positioner. Men de är opraktiska för mjuka robotar i verkliga applikationer.
I ett papper som publiceras i tidningen IEEE Robotics and Automation Letters , forskarna beskriver ett system med mjuka sensorer som täcker en robots kropp för att ge "proprioception" - vilket betyder medvetenhet om rörelse och position i kroppen. Den feedbacken stöter på en ny djupinlärningsmodell som siktar igenom bruset och fångar tydliga signaler för att uppskatta robotens 3D-konfiguration. Forskarna validerade sitt system på en mjuk robotarm som liknade en elefantstam, som kan förutsäga sin egen position när den autonomt svänger runt och sträcker sig.
Forskarnas mjuka sensorer är konduktiva silikonark som skärs i kirigamimönster. De har "piezoresistiva" egenskaper, vilket betyder att de förändras i elektrisk motstånd när de ansträngs. När sensorn deformeras som svar på robotarmens töjning och komprimering, dess elektriska motstånd omvandlas till en utspänning som sedan används som en signal som korrelerar till den rörelsen. Upphovsman:Ryan L. Truby, MIT CSAIL
Sensorerna kan tillverkas med material från hyllan, vilket innebär att alla laboratorier kan utveckla sina egna system, säger Ryan Truby, en postdoktor i MIT Computer Science and Artificial Laboratory (CSAIL) som är medförfattare på tidningen tillsammans med CSAIL postdoc Cosimo Della Santina.
"Vi sensoriserar mjuka robotar för att få feedback för kontroll från sensorer, inte synsystem, med en mycket enkel, snabb metod för tillverkning, "säger han." Vi vill använda dessa mjuka robotstrumpor, till exempel, att orientera sig och styra sig själv automatiskt, att plocka upp saker och interagera med världen. Detta är ett första steg mot den typen av mer sofistikerad automatiserad kontroll. "
Ett framtida mål är att hjälpa till att göra konstgjorda lemmar som mer skickligt kan hantera och manipulera föremål i miljön. "Tänk på din egen kropp:Du kan blunda och rekonstruera världen baserat på feedback från din hud, "säger medförfattaren Daniela Rus, chef för CSAIL och Andrew och Erna Viterbi professor i elektroteknik och datavetenskap. "Vi vill designa samma funktioner för mjuka robotar."
Formande mjuka sensorer

Upphovsman:Massachusetts Institute of Technology
Ett mångårigt mål inom mjuk robotik har varit helt integrerade kroppssensorer. Traditionella styva sensorer försämrar en mjuk robotkropps naturliga efterlevnad, komplicera dess design och tillverkning, och kan orsaka olika mekaniska fel. Mjuka materialbaserade sensorer är ett mer lämpligt alternativ, men kräver specialiserade material och metoder för sin design, vilket gör det svårt för många robotlaboratorier att tillverka och integrera i mjuka robotar.
När han en dag arbetade i sitt CSAIL -lab och letade efter inspiration för sensormaterial, Truby gjorde en intressant koppling. "Jag hittade dessa ark med ledande material som används för elektromagnetisk störning, som du kan köpa var som helst i rullar, "säger han. Dessa material har" piezoresistiva "egenskaper, vilket betyder att de förändras i elektrisk motstånd när de ansträngs. Truby insåg att de kunde göra effektiva mjuka sensorer om de placerades på vissa ställen på bagageutrymmet. När sensorn deformeras som svar på stammens sträckning och komprimering, dess elektriska motstånd omvandlas till en specifik utspänning. Spänningen används sedan som en signal som korrelerar till den rörelsen.
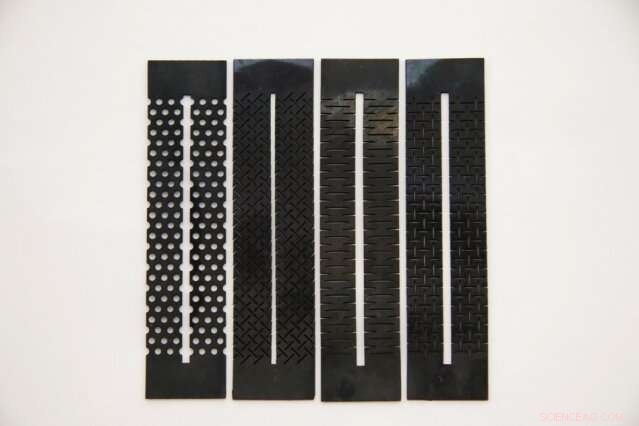
Men materialet sträckte sig inte mycket, vilket skulle begränsa dess användning för mjuk robotik. Inspirerad av kirigami-en variant av origami som inkluderar skärning i material-Truby designade och laserskurna rektangulära remsor av ledande silikonark i olika mönster, som rader med små hål eller korsande skivor som ett kedjelänkstaket. Det gjorde dem mycket mer flexibla, töjbar, "och vackert att se på, "Säger Truby.
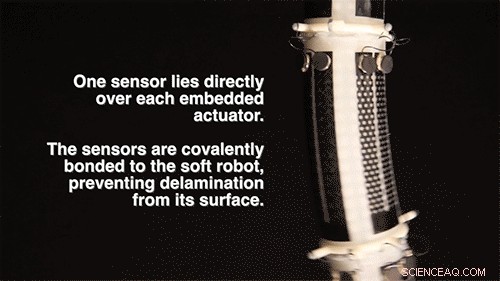
Forskarnas robotstam består av tre segment, var och en med fyra fluidiska ställdon (12 totalt) som används för att flytta armen. De smält en sensor över varje segment, med varje sensor som täcker och samlar in data från ett inbäddat ställdon i den mjuka roboten. De använde "plasmabinding, "en teknik som aktiverar en yta på ett material för att få det att binda till ett annat material. Det tar ungefär ett par timmar att forma dussintals sensorer som kan bindas till de mjuka robotarna med hjälp av en handhållen plasmabindningsanordning.

Upphovsman:Massachusetts Institute of Technology
Som hypotesen, sensorerna fångade upp stammens allmänna rörelse. Men de var verkligen bullriga. "Väsentligen, de är icke -idealiska sensorer på många sätt, "Truby säger." Men det är bara ett vanligt faktum att man gör sensorer av mjuka ledande material. Högpresterande och mer tillförlitliga sensorer kräver specialverktyg som de flesta robotlaboratorier inte har. "
För att uppskatta den mjuka robotens konfiguration med endast sensorerna, forskarna byggde ett djupt neuralt nätverk för att göra det mesta av de tunga lyft, genom att sikta igenom bruset för att fånga meningsfulla återkopplingssignaler. Forskarna utvecklade en ny modell för att kinematiskt beskriva den mjuka robotens form som kraftigt minskar antalet variabler som behövs för att deras modell ska bearbetas.
Upphovsman:Ryan L. Truby, MIT CSAIL
I experiment, forskarna fick stammen att svänga runt och förlänga sig i slumpmässiga konfigurationer över ungefär en och en halv timme. De använde det traditionella motion-capture-systemet för grundsanningsdata. I träning, modellen analyserade data från sina sensorer för att förutsäga en konfiguration, och jämförde sina förutsägelser med den grundläggande sanningsdata som samlades in samtidigt. Genom att göra så, modellen "lär sig" att kartlägga signalmönster från sina sensorer till verkliga konfigurationer. Resultat anges, att för vissa och stadigare konfigurationer, robotens uppskattade form stämde överens med markens sanning.
Nästa, forskarna syftar till att utforska nya sensordesigner för förbättrad känslighet och att utveckla nya modeller och djupinlärningsmetoder för att minska den utbildning som krävs för varje ny mjuk robot. De hoppas också att förfina systemet för att bättre fånga robotens fulla dynamiska rörelser.
För närvarande, det neurala nätverket och sensorhuden är inte känsliga för att fånga subtila rörelser eller dynamiska rörelser. Men, tills vidare, detta är ett viktigt första steg för inlärningsbaserade metoder för mjuk robotkontroll, Truby säger:"Som våra mjuka robotar, levande system behöver inte vara helt exakta. Människor är inte exakta maskiner, jämfört med våra stela robotmotstycken, och vi klarar oss bra. "
Denna artikel publiceras på nytt med tillstånd av MIT News (web.mit.edu/newsoffice/), en populär webbplats som täcker nyheter om MIT -forskning, innovation och undervisning.