Kredit:Ji et al.
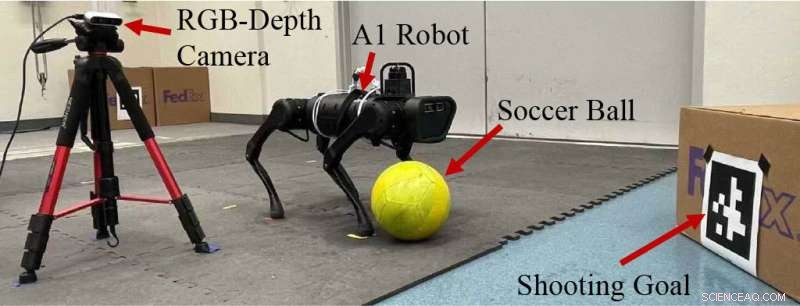
Forskarna University of California, Berkeley (UC Berkeley), Université de Montréal och Mila har nyligen utvecklat en hierarkisk förstärkningsinlärningsram för att förbättra precisionen hos fyrfotiga robotar i fotbollsskytte. Detta ramverk, som introducerades i en tidning som förpublicerats på arXiv, distribuerades på en Unitree A1, en fyrbäddsrobot utvecklad av UnitreeRobotics.
"Mänskliga ben är inte bara för förflyttning utan kan också användas för manipulation som att spela fotboll, och vi vill göra det möjligt för fyrfotiga robotar att också uppnå denna förmåga", säger Zhongyu Li, en av forskarna som genomförde studien, till TechXplore. "Det finns en anmärkningsvärd liga i robotsamhället som heter 'RoboCup' (Robot World Cup), som har bjudit in forskare att träna sina robotar för att spela fotboll i decennier."
De senaste framstegen har möjliggjort skapandet av mer tillförlitlig hårdvara och avancerade kontrollalgoritmer för robotar. Som ett resultat är robotar nu mer smidiga och kan potentiellt klara av mer komplexa uppgifter, inklusive att spela fotboll tillsammans med människor. Ramverket som utvecklats av Li och hans kollegor kan hjälpa till att förbättra fyrfotsrobotarnas förmåga att skjuta bollen under fotbollsmatcher.
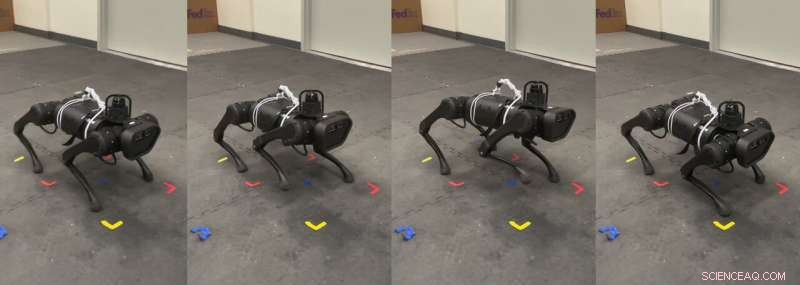
Det nya ramverket har två nyckelkomponenter:en rörelsestyrningspolicy och en rörelseplaneringspolicy. Rörelsekontrollkomponenten gör att roboten kan spåra en godtycklig bana för tån på sitt sparkande ben. Rörelseplaneringspolicyn, å andra sidan, väljer en optimal tåbana för att skjuta en närliggande fotboll (upptäckt av en extern kamera) till en målplats (t.ex. målstolpen).
Kredit:Ji et al.
"Vår design tillåter oss att dekoppla utmaningen med den exakta fotbollsskytteuppgiften i de två deluppgifterna:kontroll och planering," sa Li. "Vi kan först fokusera på att träna en robust kontrollpolicy som kan fungera på hårdvaran, sedan återanvända en sådan styrenhet för att lära oss planeringsstrategin. För att exakt skjuta bollen till mål i den verkliga världen tränas planeraren att använda den verkliga -världsdata när roboten skjuter den riktiga fotbollen."
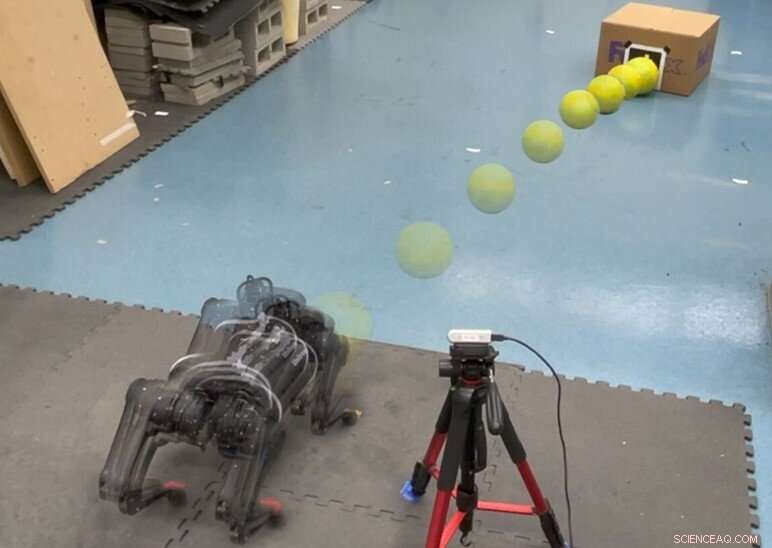
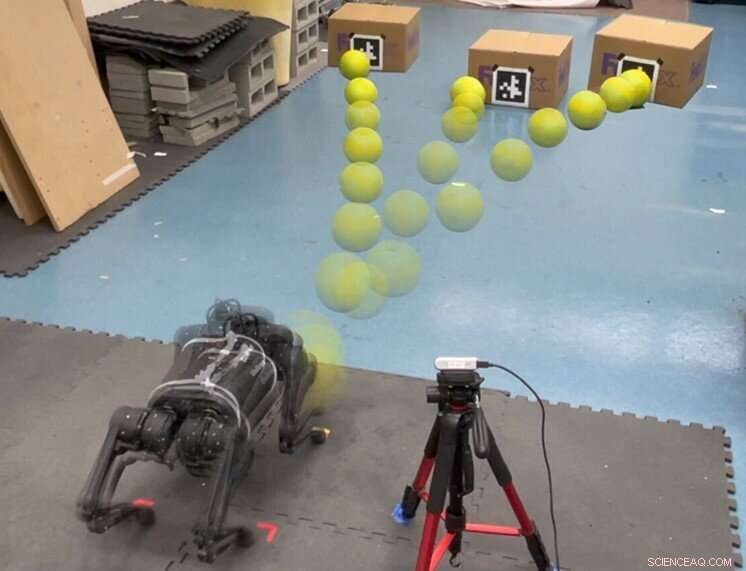
Li och hans kollegor testade sitt ramverk i en serie verkliga tester, med hjälp av en A1 fyrbäddsrobot. De fann att det gjorde det möjligt för roboten att skjuta en deformerbar fotboll till slumpmässiga mål med hög precision. Detta är en mycket komplex uppgift att ta itu med, eftersom roboten måste svänga sitt sparkande ben snabbt och få fart utan att tappa balansen.
"Fotbollen introducerar fler utmaningar eftersom roboten måste hantera inte bara den svårmodellerade mjuka kontakten med den deformerbara bollen utan också osäkerheterna i den rullande friktionen mellan bollen och marken," sa Li. "Den metod som vi utvecklat för att ta itu med sådana problem kan potentiellt vara användbar för de uppgifter där dynamiska robotar, som robotar med ben, måste interagera med mjuka föremål, som bollar, rep, koppel, kläder, etc."

Kredit:Ji et al.
Kredit:Ji et al.
Kredit:Ji et al.
I framtiden kan det ramverk som skapats av detta team av forskare användas för att förbättra prestandan hos robotar i fotbollsturneringar, särskilt Robocup. Samtidigt planerar Li och hans kollegor att ta fram andra ramverk och modeller för maskininlärning för att förbättra prestandan hos robotar i andra delar av fotbollsspel.
"Vårt långsiktiga mål är att utveckla fyrfotiga robotfotbollsspelare som en dag skulle kunna konkurrera med människor," tillade Li. "Vi utvecklar mer komplexa fotbollsfärdigheter med fyrfotsrobotar och förhoppningsvis kan vi inom en snar framtid starta ett helt autonomt fotbollsspel med fyrfotsrobotar." + Utforska vidare
© 2022 Science X Network