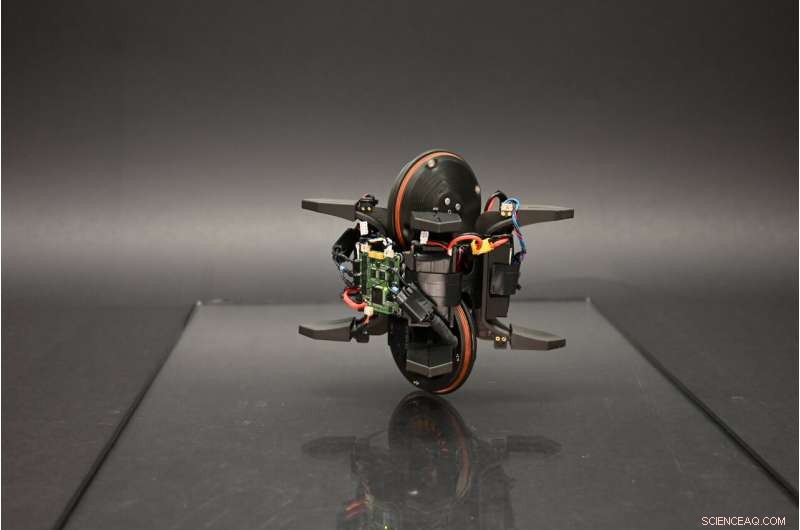
Kredit:Geist et al.
Forskare vid RWTH Aachen University i teamet av Prof. Sebastian Trimpe och Max Planck Institute for Intelligent Systems (MPI-IS) Stuttgart har nyligen utvecklat Wheelbot en enhjuling med symmetrisk reaktionshjul som självständigt kan hoppa upp på hjulen från vilken utgångsposition som helst. Denna unika robot, introducerad i en artikel publicerad i IEEE Robotics and Automation Letters tillverkades med en kombination av färdiga och 3D-utskrivna komponenter.
"Vår forskargrupp arbetar i skärningspunkten mellan datavetenskap och ingenjörskonst. En speciell inriktning av vår forskning fokuserar på att kombinera insikter från kontrollteori med maskininlärning," sa René Geist, medlem i Trimpes team i Aachen och ledande forskare bakom Wheelbot, till Tech Xplore. "Testbäddar som pendlar, robotarmar och quadcoptrar, hjälper oss att kontrollera om de teoretiska antagandena som ligger bakom en algoritm är praktiska i verkligheten. Helst är dessa testbäddar enkla att använda samtidigt som de är utmanande att kontrollera med toppmoderna algoritmer , vilket tvingar oss att tänka utanför boxen."
Två andra exempel på sådana testbäddar är den så kallade "Balancing Cube" och dess ättling "Cubli". Dessa två system har ofta hjälpt till att utvärdera effektiviteten hos nätverkskontrollsystem och datadrivna metoder för att uppnå icke-linjär kontroll.
Det senaste arbetet av Trimpe, Geist och deras kollegor bygger på dessa tidigare ansträngningar på området. Deras mål var att utveckla en minimalistisk enhjulingsrobot som skulle kunna användas som testbädd av robotister och datavetare över hela världen. För att göra detta gick Trimpe och hans forskargrupp vid RWTH Aachen University samman med Jonathan Fiene, chef för ZWE Robotics-laboratoriet vid MPI-IS.
"Tidigt i projektet valde vi att använda borstlösa motorer, eftersom ZWE robotics har mycket erfarenhet av att använda dessa i det öppna dynamiska robotinitiativet, medan priserna för lätta borstlösa motorer sjönk på grund av den utbredda anpassningen av quadcoptrar hos konsumenten marknaden," förklarade Geist. "När man tittar på en motor är det förmodligen enklaste manöverdonet man kan komma på att fästa ett hjul på den. Om ett sådant hjul nuddar marken kallar vi det ett "rullande hjul", om det inte gör det, hänvisar vi till det som ett 'reaktionshjul'."
Att balansera en enkroppsfri, icke-flygande robot med förmågan att köra och utföra manövrar kräver i allmänhet minst två hjul. Dessa kan antingen vara rullande hjul, vilket resulterar i en Segway-liknande robot eller ett enda rullande hjul och ett reaktionshjul, vilket resulterar i ett så kallat "reaktionshjul" – eller "moment exchange" - enhjulingsrobot.
Enhjulingsrobotar som integrerar reaktionshjul har mycket enkla konstruktioner och kan enkelt monteras av både experter på robottekniker och studenter. Trots sin enkelhet är enhjulingar med reaktionshjul ganska svåra att kontrollera. Detta gör dem till särskilt gynnsamma testbäddar för forskning om robotnätverk och lärandebaserade styrmetoder.
"Tidigare föreslagna enhjulingsrobotar är designade för att enbart balansera nära deras upprättstående jämviktsposition, vilket avsevärt begränsar vad du kan göra med dessa system," sa Geist. "För att maximera användbarheten hos en enhjulsrobot med reaktionshjul bestämde vi att Wheelbot måste kunna återhämta sig från ganska stora störningar, ha en inbyggd strömförsörjning för att förhindra att kablar begränsar dess manövrerbarhet, och dessutom måste kunna resa sig själv efter välta."
Precis som hjulen på enhjulingar har Wheelbot ett rullande hjul som förhindrar att den välter när den rör sig i längdriktningen. Till skillnad från enhjulingar har roboten också ett reaktionshjul som förhindrar att den välter i sidled.
"För att förstå de inre funktionerna hos ett reaktionshjul kan du göra ett enkelt experiment hemma," sa Geist. "Allt du behöver är en snurrstol och ett måttligt tungt föremål, som en katt. Sitt med knäna på stolen och räta ut armarna medan du håller i katten, rotera sedan överkroppen medsols. Medan katten dukar för sitt öde, du kommer att märka att dina knän roterar moturs. I denna analogi betecknar din överkropp motorns rotor medan din underkropp betecknar motorns stator."
I huvudsak, i reaktionshjul, när en motors rotor (fäst på hjulet) roterar medurs, kommer motorns stator (ansluten till resten av Wheelbot) att rotera moturs. Robotar som balanserar med hjälp av ett reaktionshjul skiljer sig från robotar som använder gyroskop för att balansera. I ett gyroskop roteras ett snabbt snurrande hjul ortogonalt i förhållande till dess rotationsriktning och skapar balanserande vridmoment på grund av att vinkelmomentet bevaras.
I ett reaktionshjul förekommer även dessa effekter, men de är mycket små jämfört med reaktionsmomenten. Reaktionsmoment skapas direkt inuti hjulet och pekar parallellt med hjulets rotationsriktning.
Kredit:Geist et al.
"Under självuppställning måste reaktionsvridmomentet rotera Wheelbot med 90 grader," förklarade Geist. "Under manövern drar Wheelbots motor 16 Ampere vid 24 volt. För en 22 cm (8,7 tum) stor robot fyller motorerna faktiskt mycket kraft, vilket tvingar oss att använda en specialdesignad motorstyrenhet, eftersom kommersiellt tillgängliga motorstyrenheter var antingen för stor eller kunde inte hantera tillräckligt med ström vid den givna spänningen."
Vid ett strömdrag på 16 Ampere fann forskarna att motorn som rörde Wheelbot nådde sin hastighetsgräns på bara 0,25 sekunder. På grund av denna begränsning och andra utmaningar som vanligtvis stöter på när man bygger reaktionshjulbaserade enhjulingar, beslutade Geist och hans kollegor att ta fram en helt ny design för sin robot.
"Först bestämde vi oss för att roboten skulle vara symmetrisk, vilket effektivt minskar antalet olika delar som man behöver skriva ut och tillåter Wheelbot att använda vilket som helst av sina hjul som rullande hjul," sa Geist. "Symmetri har den ytterligare fördelen att det övre hjulet måste vara betydligt mindre jämfört med befintliga enhjulingsrobotar vilket minskar dess rotationströghet i girriktningen. För det andra designade vi robotens dimensioner för att minimera det vridmoment som krävs för självresning."
I de första testerna fann forskarna att standardversionen av deras robot kunde hoppa upp på hjulen från alla initiala positioner i två steg. Detta gör att roboten kan bromsa in sitt reaktionshjul innan den slutför det andra och sista steget (d.v.s. trycker upp sig själv igen). '
Förutom att skapa en prototyp av sin robot skapade Geist och hans kollegor även en anpassad tillståndsuppskattare, en algoritm som kan uppskatta robotens rullnings- och stigningsvinklar. Detta system härleder sina uppskattningar från mätningar av robotens fyra tröghetsmätenheter (IMU) och hjulkodare, som endast är baserade på tidigare och tillgänglig kunskap om robotens så kallade kinematiska modell (dvs. en matematisk beskrivning av positionen för roboten) masscentrum).
"Vi tror att i fallet med hjulförsedda robotar (inklusive Ballbots) utgör den föreslagna skattaren ett intressant alternativ till andra uppskattningsalgoritmer som Kalman-filtrering," sa Geist. "Wheelbot visar att ett kortfattat val av en reaktionshjuls enhjulingsrobots dimensioner och hårdvara ger en mångsidig testbädd för robotstyrning."

Kredit:Geist et al.
Geist och hans kollegor var de första som skapade en enhjulingsrobot som effektivt kan hoppa på hjulen från vilken utgångsposition som helst. Deras papper är således ett viktigt bidrag till robotteknikområdet, eftersom det löser de elektroniska och mekaniska utmaningar som vanligtvis möter när man skapar denna nya typ av reaktionshjulbaserade enhjulingar.
"Förutom att det är en utmanande testbädd för robotstyrning, ser vi stor potential för Wheelbot som en utbildningsplattform som introducerar elever för robotik," sa Geist. "I detta avseende är Wheelbot ett typiskt exempel för att demonstrera robotteknikens tvärvetenskapliga natur. Förutom att dess mekaniska design kräver modellering och simulering av robotens ganska intressanta dynamik, utgör högströmsdraget av dess motorer betydande utmaningar för dess elektronikdesign."
I framtiden kan Wheelbot användas i både utbildnings- och forskningsmiljöer för att testa robotstyrningsnätverk, maskininlärningsalgoritmer och andra modeller. En viktig fördel med roboten är att dess drift endast kräver grundläggande kunskaper om mjukvaruteknik, vilket gör den till en idealisk experimentell plattform för studenter och ingenjörer som tar sina första steg inom robotik.
Forskare i Trimpes team arbetar nu med en ny version av sin robot, kallad Wheelbot v3. Ett centralt mål är att göra roboten ännu mer tillgänglig, så att den är lättare att bygga, använda och experimentera med.
"Nästa version av Wheelbot kommer att vara lite mindre än den nuvarande versionen, använder en kraftfullare mikrokontroller, och när det gäller dess firmwaredesign är den lättare att använda," tillade Geist. "Dessutom arbetar vi för närvarande med en kontrollalgoritm som styr Wheelbot längs en fördefinierad väg. Efter att ha byggt den första enhjulingsroboten med hoppande reaktionshjul är vi glada att kunna visa att Wheelbot också kan utföra smidiga körmanövrar." + Utforska vidare
© 2022 Science X Network