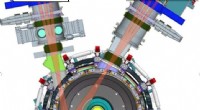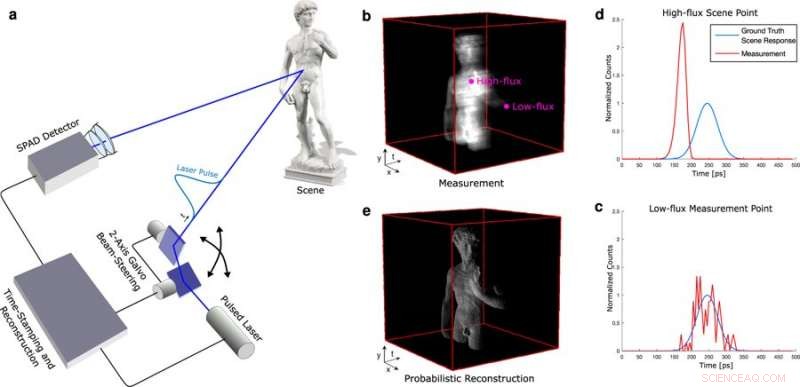
Sub-picosecond 3D Imaging Framework. (a) A kollimerade, pulserande laser belyser scenen vid en enda punkt. Lasern skannas i sidled med en 2-axlig spegelgalvanometer. Timing och kontrollelektronik tidsstämplar varje upptäckt foton ankomst i förhållande till den senast utsända pulsen och ackumulerar dessa händelser i ett histogram av spatio-temporala fotonantal (b). Detta histogram behandlas för att uppskatta både reflektivitet och djupinformation (c). Två punkter markeras, en motsvarar högflödes (d) och den andra med lågflödesmätningar (e). Medan de senare är bullriga, högflödesmätningar lider av pileup-distorsion som introducerar en betydande förspänning för djupuppskattningen av konventionella algoritmer. Den föreslagna uppskattningsmetoden modellerar exakt båda dessa scenarier, vilket möjliggör uppskattning av reflektionsinformation och restid med underpikosekundnoggrannhet från kraftigt förvrängda mätningar. Kreditera: Vetenskapliga rapporter , Doi:10.1038/s41598-018-35212-x
Enfoton lavindioder (SPAD) är lovande detektorteknologi som kan användas för att uppnå aktiva 3D-avbildningssystem med snabb förvärv, hög timingnoggrannhet och hög detekteringskänslighet. Sådana system har breda tillämpningar inom biologisk avbildning, fjärranalys och robotik. Dock, detektorerna står inför tekniska funktionsnedsättningar som kallas pileup som gör att mätningsförvrängningar begränsar deras precision. I en färsk studie, genomförd vid Stanford University Department of Electrical Engineering, forskare Felix Heide och medarbetare utvecklade en probabilistisk bildbildsmodell som exakt skulle kunna modellera upphopning. Med hjälp av den föreslagna modellen, forskarna utarbetade omvända metoder för att effektivt och robust uppskatta scenens djup och reflektion från registrerade fotonräkningar. Med algoritmen, de kunde visa förbättringar av tidpunktens noggrannhet, jämfört med befintliga tekniker. Mer viktigt, modellen tillät noggrannhet vid sub-picosekonden i fotoneffektiv 3D-avbildning för första gången i praktiska scenarier, medan tidigare endast mycket varierande fotonantal observerades. Resultaten publiceras nu i Vetenskapliga rapporter .
Aktiv bildbehandling har breda tillämpningar inom discipliner som sträcker sig från autonom körning till mikroskopisk avbildning av biologiska prover. Viktiga krav för dessa applikationer inkluderar hög noggrannhet med timing, snabba förvärvshastigheter, dynamiska driftsområden och hög detekteringskänslighet för bildobjekt dolda från kamerans syn. Fjärranalys och automatiska applikationer kräver förvärv från <1 meter till kilometerskalan.
Icke-synlig avbildning förlitar sig på att erhålla kodad information via de få återvändande fotonerna med multipelt spritt indirekt ljus, förutom det direktreflekterade ljuset. För att aktivera dessa applikationer, ultrakänsliga detektorer utvecklades för att registrera enskilda fotoner som återvände från en pulserad belysningskälla. Enfoton lavindioder (SPAD) är en av de mest känsliga tidsupplösta detektorteknikerna som kan produceras med hjälp av den komplementära metalloxid-halvledaren (CMOS) tillverkningsprocess. SPAD -enheterna etablerades snabbt som en kärndetektorteknik för 3D -avbildning.
I sin funktionsprincip, SPAD är omvända partiska fotodioder som fungerar i Geiger-läge, dvs över deras nedbrytningsspänning. När fotoner infaller på den aktiva ytan av en SPAD, en tidsstämplad elektronskred kan utlösas. Upprepad tidsstämpling av fotoner som återvänder från en synkront pulserad belysningskälla som vanligtvis arbetar med MHz -hastigheter kan ackumulera ett histogram av fotonräkningar i tid. Det resulterande histogrammet dokumenterar den ungefärliga intensiteten hos den återvändande ljuspulsen för att återhämta sig och karakterisera avståndet, reflektans och 3D -geometri för ett föremål dolt.
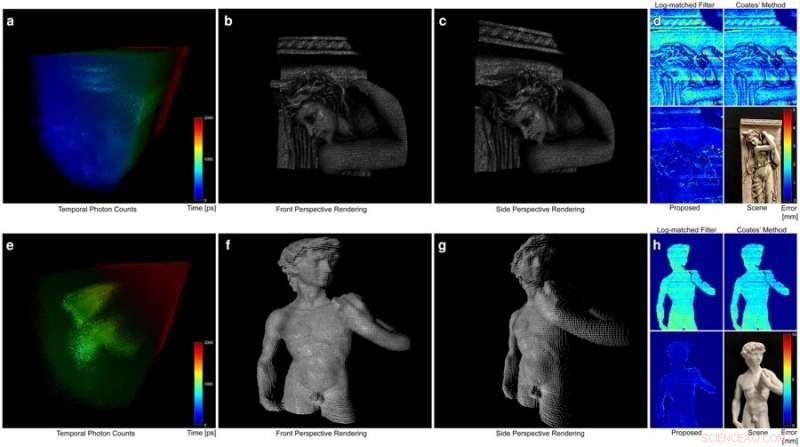
Experimentella rekonstruktioner. En inspelad spatio-temporal fördelning av fotonantal. (a, e) bearbetas för att uppskatta ett 3D -punktmoln (b, c, f, g) som innehåller både djup- och albedoinformation, här visas för två olika scener (fotografierna visas i (d, h)). De färgkodade felkartorna (d, h) jämför direkt resultaten från flera djupuppskattningstekniker, inklusive loggmatchad filtrering, Coates metod följt av Gaussisk passform (vid högflödesmätning), och den föreslagna metoden. Kreditera: Vetenskapliga rapporter , Doi:10.1038/s41598-018-35212-x
Beroende på den förväntade applikationen, SPADs kan fungera i fritt körläge (som gör att alla fotonhändelser kan detekteras samtidigt vid alla ankomsttider) eller gated mode (där endast fotoner i ett specifikt tidsfönster mellan pulser detekteras). Alla applikationer är föremål för ett grundläggande fenomen som kallas pileup -distorsion som kraftigt begränsar noggrannheten. Pileup kan inneboende begränsa SPAD -detektorns arbetsprincip. Till exempel, efter varje utlöst elektronskred, detektorn kräver släckning innan detektering av ytterligare foton ankomsthändelser. Under denna "döda tid" (tio till hundratals nanosekunder), detektorn är inaktiv. Detta kan leda till att de tidigare fotonerna av en enda laserpuls utlöser en lavin, medan senare pulser sannolikt ignoreras under dödtiden; skapa felaktiga skeva mätningar som kallas pileup. Fenomenet kan undvikas genom att använda aktiva avbildningssystem i ett lågflödesregim, som sett med toppmoderna tekniker som använts för första fotonbildning tidigare.
Dock, villkoren varierar för 3D -avbildningsapplikationer inom robotik, biologisk avbildning eller fordonsavkänning när de fungerar i miljöer där objekt som speglar både högt och lågt antal fotoner är avgörande för beslutsfattande. Den stora variationen i förvärvade fotonräkningar som härrör från olika djup eller olika objekts varierande reflektivitet är avgörande för 3D -avbildning. I det här arbetet, Heide et al. introducerade en ny estimeringsalgoritm som övervann befintliga begränsningar för aktiva 3D -bildsystem med fritt körande SPAD.
Den föreslagna metoden förbättrade noggrannheten i det befintliga djupet och albedouppskattningen, över ett brett intervall från lågflödes- till högflödesmätningar. Forskarna introducerade en probabilistisk bildbildningsmodell som inkluderade pileup, med effektiva omvända metoder för djup- och albedouppskattningar. Rekonstruktionsramen uppskattade gemensamt alla okända parametrar för att övervinna algoritmiska begränsningar som tidigare begränsade timingprecisionen. Den föreslagna metoden möjliggjorde mycket exakt och snabb 3D-avbildning för att öppna nya driftsregimer för fotoneffektiv 3D-avbildning som är tillämplig under förhållanden med dramatiskt varierande fotonantal.
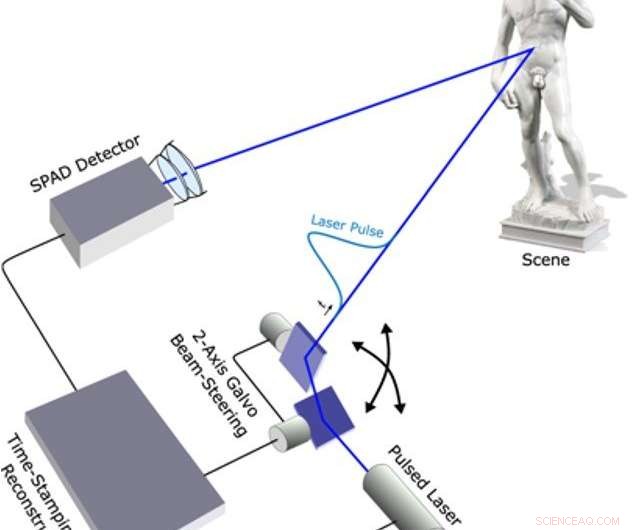
Experimentell hårdvara för 3D -avbildning. Den schematiska bilden visar scenen "Staty av David", belysningskälla och proceduren för tidsstämpling för bildrekonstruktion. Kreditera: Vetenskapliga rapporter , Doi:10.1038/s41598-018-35212-x
Prestandan för den föreslagna metoden bedömdes på två scener med mycket varierande reflektans- och djupprofiler, som inkluderade statyn av David och en Bas-relief-scen. Båda instanserna innehöll föremål med komplexa geometrier och varierande reflektansegenskaper, inklusive spekulärt beteende för "Staty av David" och Lambertiansk reflektion med rumsligt varierande albedo i "Bas-relief" -scenen. För båda scenerna fångade forskarna en markmässig referensmätning (information tillhandahålls av empiriska bevis) med ett 5% neutralt densitetsfilter, vilket eliminerade hopstörningar genom att dämpa källintensiteten.
Hårdvaran i systemet innehöll en tidsupplöst sensor, pulserande laser, belysning och samlingsoptik. Uppsättningen hade också en uppsättning skanningsspeglar för att uppnå ett raster -skanningsbelysningsmönster. Tidpunkten för fotonankomster fångades med en PicoHarp 300 tidskorrelerad enda fotonräknemodul. Belysningskällan var en 450 nm eller 670 nm pikosekundlaser (genererar full bredd vid halv maximalt FWHM, pulsbredder på 90 ps och 50 ps). Samlingsoptiken bestod av ett 75 m objektiv, 30 mm relälins och ett mikroskopobjektiv, utformad för att utvidga SPAD:s synfält över det område som skannas av belysningskällan.
De experimentella mätningarna fungerade som input för den föreslagna metoden och förvärvades utan filter i den optiska vägen. Djup- och albedonekonstruktioner tillsammans med motsvarande felkartor erhölls under studien. Resultaten bekräftade att den föreslagna metoden uppnådde rekonstruktioner av hög kvalitet, opåverkade av scenberoende hoprullning eller skottbrus (elektroniskt brus associerat med ljusets partikelkaraktär). Resultaten jämfördes med konventionella metoder, till exempel den loggmatchade filteruppskattningen och Coates metod för korrigering av pileup som inte lika effektivt undertryckte pileup och led av scenberoende djupprecision. I kontrast, metoden introducerad av Heide et al. uppnått sub-picosekund noggrannhet.
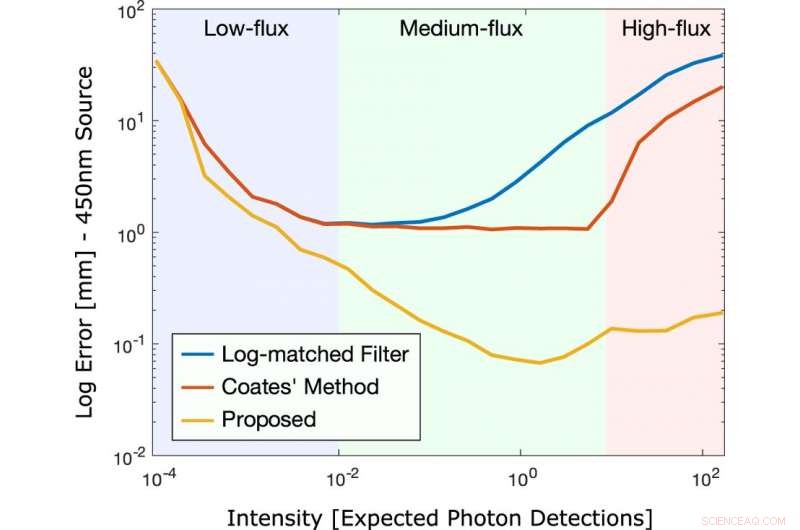
Optimal fotonräkning. Djuprekonstruktionens noggrannhet för olika fotonantal för 450 nm Alphalas LD-450-50 laser (FWHM på 90 ps). Det konventionella loggmatchade filtret, Coates metod, och den föreslagna metoden jämförs. Det optimala antalet fotonantal ligger runt det okonventionella området på 1 foton som detekteras per puls i genomsnitt, oberoende av impulsresponsen och för ett brett spektrum av histogramfackbredder. Kreditera: Vetenskapliga rapporter , Doi:10.1038/s41598-018-35212-x
Koden och data som används av Heide et al. för att generera resultaten av studien kommer att finnas tillgänglig på GitHub. Totalt, den föreslagna modellen för sannolikhetsbildbildning och motsvarande omvända metoder uppnådde noggrannhet under pikosekunder för aktiv 3D-avbildning, trots att laserpulsbredderna är större än 50 ps. Den nya metoden uppnådde hög precision över ett dynamiskt intervall från lågflöde till högflödesmätning jämfört med traditionella tekniker. I framtiden, den föreslagna metoden kan underlätta förvärvet över långa avstånd genom att multiplexera flera pileup-påverkade svar. Den föreslagna innovationen banar väg för snabba och exakta fotoneffektiva 3D-bildsystem, där mycket varierande fotonantal iakttas i praktiken. Applikationer kan sträcka sig över breda discipliner för att inkludera 3D -kartläggning och navigering, rekonstruktion och bevarande av konst, autonom körning, vision för robotar och maskiner, geografisk information, industriell och mikroskopisk avbildning.
© 2018 Science X Network