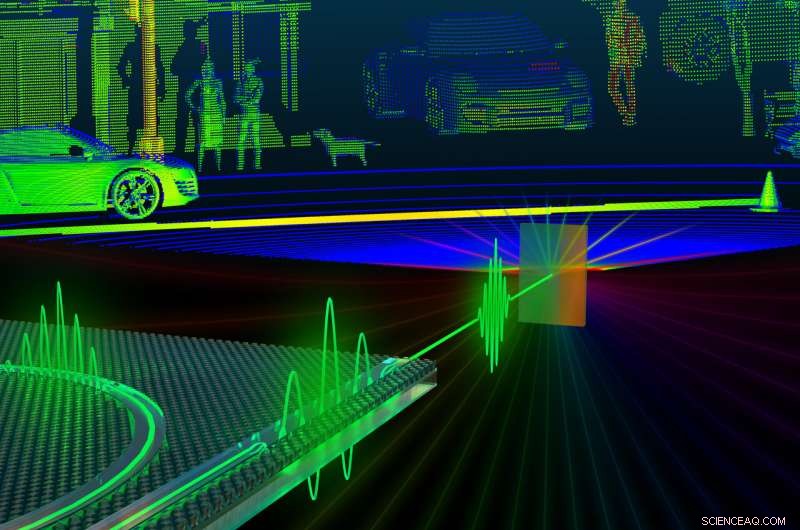
En illustration av LiDAR -vågor. Upphovsman:Johann Riemensberger (EPFL)
Ljusdetektering och avstånd (LiDAR) omfattar en rad tekniker som använder laserljus för att mäta avstånd genom att multiplicera tidsfördröjningen mellan överförda och mottagna optiska signaler med ljusets hastighet. Moderna 3D-LiDAR-sensorer kombinerar hög lateral/vertikal och radiell upplösning, och är nyckelkomponenter i den pågående utvecklingen av nivå 4 och 5 självkörande bilar.
Framträdande av 3D-avkänning av LiDAR har sina rötter i DARPA:s autonoma körutmaning 2007 med introduktionen av de första Velodyne-spinnande lasermatrisensorer som mäter upp till 128 laserlinjer parallellt. De flesta moderna LiDAR-sensorer förlitar sig på principen för flygtid där korta pulser eller pulsmönster avges från sensoröppningen och kraften hos bakreflekterat ljus detekteras med en kvadratisk fotodetektor.
En annan princip är att koherent laser varierar, viktigast av allt frekvensmodulerad kontinuerlig våg (FMCW) LiDAR, där lasern är inställd för att avge linjära optiska frekvenskvitter. Heterodyne blandar med en kopia av det utsända laserljuset kartlägger målavståndet till en radiofrekvens.
Samstämd detektering har många inneboende fördelar såsom förbättrad avståndsupplösning, direkt hastighetsdetektering via Doppler -effekten, och ogenomtränglighet för solljusbländning och störningar. Men den tekniska komplexiteten med att exakt styra frekvens-smidiga lasers med smal linjebredd har hittills förhindrat framgångsrik parallellisering av FMCW LiDAR.
Nu, forskare vid Tobias Kippenbergs laboratorium vid EPFL har hittat ett nytt sätt att implementera en parallell FMCW LiDAR -motor genom att använda integrerade olinjära fotoniska kretsar. De kopplade en enda FMCW-laser till en plan kiselnitridmikroresonator, där laserljuset för kontinuerlig våg omvandlas till ett stabilt optiskt pulståg på grund av den dubbla balansen i dispersionen, olinearitet, pumpning och förlust av hålrum.
Studien har publicerats i Natur .
"Förvånande, bildandet av det avledande Kerr soliton kvarstår inte bara när pumplasern kvittrar, men överför kvittret troget till alla genererade kamtänder, "säger Johann Riemensberger, postdoc på Kippenbergs lab och första författare till studien.
Den lilla storleken på mikroresonatorn innebär att kamtänderna ligger 100 GHz från varandra, vilket är tillräckligt för att skilja dem med standard diffraktionsoptik. Eftersom varje kamtand ärver pumplaserns linjära kvittring, det var möjligt att skapa upp till 30 oberoende FMCW LiDAR -kanaler i mikroresonatorn.
Varje kanal kan mäta avstånd och hastighet för ett mål samtidigt, medan spektralseparationen av de olika kanalerna gör enheten immun mot kanalöverhörning, samt en naturlig passform för samintegration med nyligen utplacerade optiska fasfaser baserade på fotoniska integrerade optiska gallersändare.
Den rumsliga separationen av emitterade strålar och drift i 1550 nm-våglängdsbandet slappnar av annars strikta ögon- och kamerasäkerhetsbegränsningar. "Tekniken som utvecklats här på EPFL kan tio gånger förbättra förvärvstakten för sammanhängande FMCW LiDAR inom en snar framtid, "säger Anton Lukashchuk, Ph.D. student i Kippenbergs lab.
Konceptet bygger på högkvalitativa kiselnitridmikroresonatorer med rekordlåga förluster bland plana olinjära vågledarplattformar, som producerades vid EPFL:s Center for MicroNanotechnology (CMi). Kiselnitridmikroresonatorerna är redan kommersiellt tillgängliga av EPFL spinoff LiGENTEC SA som har specialiserat sig på tillverkning av kiselnitridbaserade fotoniska integrerade kretsar (PIC).
Detta arbete banar ett sätt för den utbredda tillämpningen av sammanhängande LiDAR i autonoma fordonsapplikationer i framtiden. Forskarna fokuserar nu på heterogen samintegrering av laser, icke-linjära mikroresonatorer med låg förlust, och fotodetektorer i ett enda och kompakt fotoniskt paket.