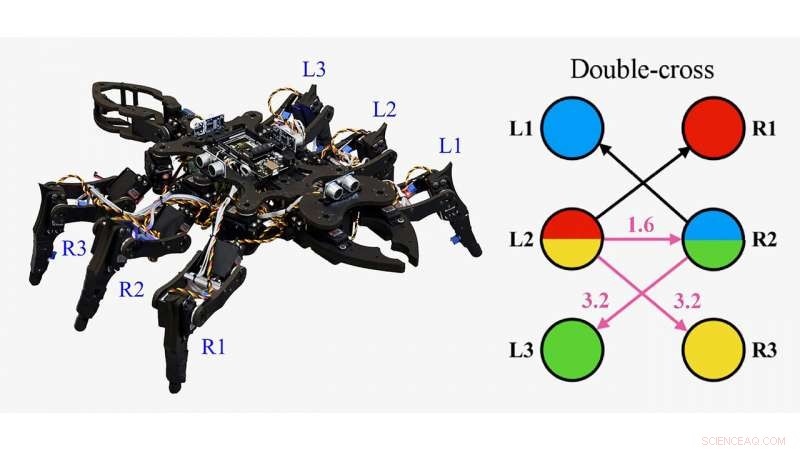
Forskare i Japan och Italien omfamnar kaos och olinjär fysik för att skapa insektsliknande gångarter för små robotar - komplett med en rörelsekontroll för att tillhandahålla ett gränssnitt mellan hjärna och maskin. Vy över deras experimentella robot och kopplingsscheman för dess gångarter. Kredit:Ludovico Minati
Forskare i Japan och Italien omfamnar kaos och olinjär fysik för att skapa insektsliknande gångarter för små robotar – komplett med en rörelsekontroll för att tillhandahålla ett gränssnitt mellan hjärna och maskin.
Biologi och fysik genomsyras av universella fenomen grundat i olinjär fysik, och det inspirerade forskarnas arbete.
I journalen Kaos , gruppen beskriver användningen av Rössler-systemet, ett system av tre icke-linjära differentialekvationer, som en byggsten för centrala mönstergeneratorer (CPG) för att kontrollera en robotinsekts gång.
"De underliggande fenomenens universella natur gjorde det möjligt för oss att visa att rörelse kan uppnås via elementära kombinationer av Rössler-system, som representerar en hörnsten i de kaotiska systemens historia, sa Ludovico Minati, vid Tokyo Institute of Technology och University of Trento.
Fenomen relaterade till synkronisering gör att gruppen kan skapa mycket enkla nätverk som genererar komplexa rytmiska mönster.
"Dessa nätverk, CPG, är grunden för benrörelse överallt i naturen, " han sa.
Forskarna började med ett minimalistiskt nätverk där varje instans förknippas med ett ben. Att ändra gång eller skapa en ny kan åstadkommas genom att helt enkelt göra små ändringar i kopplingen och tillhörande fördröjningar.
Med andra ord, oegentligheter kan läggas till genom att göra enskilda system eller hela nätverket mer kaotiskt. För icke-linjära system, en förändring av output är inte proportionell mot en förändring av input.
Detta arbete visar att Rössler-systemet, utöver dess många intressanta och komplicerade egenskaper, "kan också framgångsrikt användas som ett substrat för att konstruera en bioinspirerad rörelsekontroll för en insektsrobot, sa Minati.
Deras styrenhet är byggd med ett elektroencefalogram för att möjliggöra ett hjärn-dator-gränssnitt.
"Neuroelektrisk aktivitet från en person registreras och icke-linjära koncept för fassynkronisering används för att extrahera ett mönster, ", sa Minati. "Detta mönster används sedan som grund för att påverka dynamiken i Rössler-systemen, som genererar gångmönstret för insektsroboten."
Forskarna utnyttjar de grundläggande idéerna om olinjär dynamik två gånger.
"Först, vi använder dem för att avkoda biologisk aktivitet, sedan i motsatt riktning för att generera bioinspirerad aktivitet, " han sa.
Nyckelimplikationen av detta arbete är att det "visar generaliteten hos icke-linjära dynamiska begrepp såsom förmågan hos Rössler-systemet, som ofta studeras i ett abstrakt scenario, " sa Minati, "men används här som en grund för att generera biologiskt rimliga mönster."