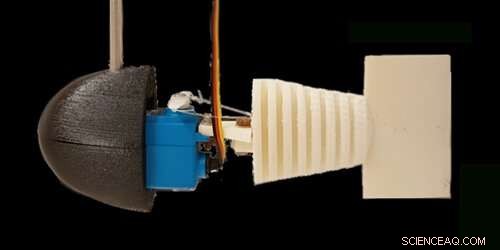
Forskarnas enkla robotenhet. Det vita materialet är 3D -tryckt med deformerbara polymerer. En servomotor (blå) driver två kablar som ger roboten deformation. Den mörka delen är 3D -tryckt i ett fast material. Upphovsman:Sanchez-Rodriguez et al.
Under de senaste decennierna har robotiker har utvecklat en mängd olika robotar inspirerade av naturen, människor och djur. För att effektivt efterlikna djur eller människor, dock, dessa robotar ska inte bara se ut som dem; de bör också röra sig på liknande sätt.
Forskare vid Université Côte d'Azur- CNRS har nyligen introducerat en ny bioinspirerad mekanism för att uppnå fiskliknande simning i robotar. Denna mekanism, presenteras i ett papper publicerat i Fysiska granskningsbrev , är baserad på det som kallas proprioception, djurs förmåga att samla information om sin kropps position, rörelse och acceleration.
"Med mina kollegor M. Gazzola och L. Mahadevan, vi har avslöjat en allmän lag som förutspår makroskopiska undervattenssimmares hastighet som en funktion av simgången, d.v.s. amplituden och frekvensen för flänsen/svansen, "Mederic Argentina, en av forskarna som genomförde studien, berättade Phys.org . "Vårt arbete gav en rationell förklaring av denna skalningslag som arbetade på simmare med några centimeters längd till de största djuren, såsom blåvalar (30 m). "
För att testa deras modell, forskarna ville samla in kinematisk data om svansböljning, som ännu inte har mätts hos levande djur. Dessutom, de var nyfikna på att förstå vilka mekanismer som tillåter en given simmare att välja amplituden och frekvensen för svansens rörelse. För att uppnå detta, de byggde en liten följsam robot med en kropp som biomimetiskt kan deformeras.
"Denna robotplattform tillät oss att validera vår skalningslag, men också för att utforska scenarier för val av böljande kinematik, "Argentina sa." Det verkade naturligt att proprioception skulle vara en utmärkt kandidat, eftersom det är en känsla (ibland kallad som sjätte sinnet) som utvärderar kroppsdeformation, dess acceleration eller filtkraften. I vår senaste tidning, vi ifrågasatte om en återkopplingsslinga som styrs av proprioception kan utlösa rörelse och vårt arbete visade att proprioceptiva sensorer verkligen kan framkalla en trevlig och stadig simning. "
Upphovsman:Sanchez-Rodriguez et al.
Den främsta fördelen med den proprioceptiva mekanismen som introducerats av Argentina och hans kollegor är att den tillåter robot simmare att anpassa sin böljning till sin omgivande miljö, precis som många fiskar gör. Faktiskt, de flesta fiskar har sidled som kan mäta vätsketryck på kroppen, så att de kan integrera proprioceptiva sinnen.
"Vår idé var att utnyttja feedbacken på robotens filtkraft till svansens deformation, "Sade Argentina." Detta tillvägagångssätt är alltså enkelt, robust och kan förklara valet av simgångar. "
Forskarna testade den proprioceptiva mekanismen de utvecklade på en riktig biomimetisk robot, att jämföra sin prestanda med vad den uppnådde när man använde en generisk modell för robotsimning. Deras resultat var mycket lovande, eftersom deras mekanism jämfördes positivt med den generiska modellen och möjliggjorde fiskliknande simning i roboten.
"Proprioception kan också vara det första steget för att skapa böljande robotar som automatiskt anpassar sin kinematik till miljön, "Argentina sa." Vårt arbete visade att denna enkla koppling av proprioception till svansrörelse kan utlösa en instabilitet som ger svansen att böljas och driver simmaren. "
I framtiden, den proprioceptiva mekanism som utarbetats av detta forskargrupp kan möjliggöra utveckling av vattenrobotar som kan röra sig mer effektivt i vatten. Under tiden, Argentina och hans kollegor kommer att fortsätta arbeta med sin robot för att förbättra dess kapacitet.
"Vi lär för närvarande roboten simma med hjälp av maskininlärningstekniker, "Argentina sa." Våra första resultat ger oss mycket förtroende för att vi ska kunna konstruera/designa böljande robotar som simmar med AI. "
© 2021 Science X Network