Robotar blir bättre och bättre på att förstå omvärlden. De kan nu känna igen föremål, navigera i sin omgivning och till och med undvika hinder. Men det finns fortfarande vissa saker som robotar har svårt att göra, som att ordna föremål på ett specifikt sätt.
Ett sätt som robotar kan lära sig att göra detta på är genom att hallucinera människor i sin miljö. Genom att föreställa sig vad en människa skulle göra i en given situation kan en robot lära sig att utföra uppgifter som den annars kanske inte skulle kunna räkna ut på egen hand.
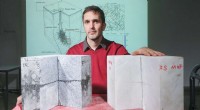
Detta är det tillvägagångssätt som forskare vid University of California, Berkeley tog i en nyligen genomförd studie. De utvecklade ett system som heter "Hallucinative Robotic Rearranging" som gör att robotar kan lära sig hur man ordnar föremål genom att föreställa sig vad en människa skulle göra i samma situation.
Så här fungerar det:
1. Roboten tar en bild av miljön.
2. Roboten genererar en 3D-modell av miljön.
3. Roboten hallucinerar en människa till 3D-modellen.
4. Roboten simulerar hur människan skulle flytta föremålen i miljön.
5. Roboten följer människans rörelser för att ordna om föremålen.
Detta tillvägagångssätt har visat sig vara mycket effektivt. I en serie experiment kunde robotar framgångsrikt arrangera föremål i en mängd olika miljöer, inklusive ett kök, ett vardagsrum och ett sovrum.
Forskarna tror att detta tillvägagångssätt kan användas för att lära robotar en mängd olika uppgifter, som att laga mat, städa och till och med bygga saker.
Video:
[Här är en video som visar hur Hallucinative Robotic Rearranging fungerar](https://www.youtube.com/watch?v=z15j70_51w4).